煤矿井下长距离巷道智慧巡检机器人研发与应用
时间:2024-04-24 作者:刘建,高永广,黄怀德 来源:智能矿山网 分享:我国大部分煤炭资源存储位于地底深层,要保证煤炭安全生产,需要一个强大的安全监控系统。煤矿安全监控系统已被纳入国家安全生产监督管理总局确定的安全生产“七大攻坚举措”项目中。尽管煤矿安全监测系统日趋完善,但仍然缺乏一种高效便捷的方法来监测巷道中的危险因素,如巷道形变、顶板塌方、锚杆脱落等。传统的人工巡检在井下安全检测中面临着劳动强度大、漏查率高、安全性差、条件恶劣等问题。
随着智能矿山的建设,分布式定点监控和视频巡检机器人已经在保障生产现场安全方面扮演了关键角色。其向监控中心提供的详细而全面的实时信息和图像数据,满足事故预防和分析的需求。然而,由于定点视频监控的覆盖范围有限,要实现全面覆盖就需要投入大量监控人力和物力资源,这在经济和效率上并不是最理想的方案。而巡检机器人可以满足煤矿智能化建设需求,但机器人技术距离实际应用仍有较大差距,大多依赖井上工作人员的远程监控。此外,受限于机器人电源供给问题,巡检机器人巡检距离有限,设备成本较高,无法满足煤矿生产过程的大范围的覆盖。因此,亟待一种长距离智能巡检装置以实现对煤矿井下巷道的智能化、全方位监测。
智慧巡检机器人构成及功能
井下长距离巷道智慧巡检机器人(智慧巡检机器人) 基于现有的胶轮车进行智能化改造,配备激光雷达、断面扫描仪、摄像头、红外传感器、气体传感器、语音对讲系统、温湿度传感器、粉尘传感器和烟雾传感器等先进设备,以实现对矿井巷道情况的全面监测和检测,能够在恶劣的环境下不间断地工作。通过这些设备,智慧巡检机器人能够实时定位自身位置,监测巷道断面的变形和沉降情况,对巷道进行视频监控,监测巷道设备的异常温度变化,以及巷道环境中的气体浓度等。结合煤矿井下巷道巡检环境和智慧巡检机器人的功能需求,智慧巡检机器人整体架构如图1 所示。
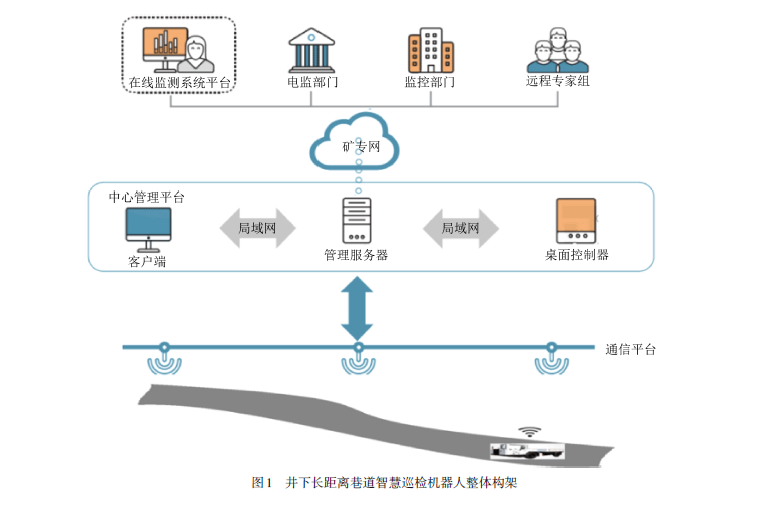
智慧巡检机器人能够将传感器监测到的数据信息通过矿井生产环网实时上传至数据管控中心,并以完备的人机交互界面进行展示。上位机会对获取的数据进行特征处理,包括数据存储和特征提取,并在判断巷道有异常状况时,显示相关告警信息,如异常类型和异常位置。这一功能不仅能实现故障报警,而且能生成报表,使得巡检工作更加高效。可实现井下巷道状态信息的交互、图像数据的展示、数据展示、预警、辅助决策、信息统计分析等功能。上述功能使得巡检工作变得更加智能、可视化,从而实现无人智能巡检的目标。
智慧巡检机器人具备自主巡检能力,能够在恶劣的环境中连续工作而不受影响。此外,智慧巡检机器人的使用还可提升安全性,及时发现异常情况并采取应急措施,最大限度地减少事故的发生。
智慧巡检机器人的功能实现由六大部分组成,分别为车辆本体、防爆箱、井下定位模块、外围传感器及转接件、鸿蒙显示终端和井上调度系统(图2)。智慧巡检机器人车体选用德塔DELTA—WLR2(C),整车外形尺寸较小、机动灵活、四轮驱动、爬坡和通过性能强,转弯半径小、运行效率高、驾驶乘坐舒适性高。根据煤矿安全运输特点设计,车体符合GB 7258—2012 《机动车运行安全技术要求》《矿用防爆锂离子蓄电池无轨胶轮车安全技术要求》,所配套的电气设备均符合GB 3836.1—3836.4 的有关规定。智慧巡检机器人样机如图2 所示。

智慧巡检机器人实现的主要功能包括:
(1) 具备地图构建及实时定位功能,管控中心软件界面能实时监测智慧巡检机器人在巷道中的实际位置。
(2) 具备避障功能,智慧巡检机器人在巷道行驶中,遇到障碍时,能自动停止行进。
(3) 具备对环境气体(甲烷、一氧化碳、二氧化碳、氧气) 浓度参数的采集和分析功能,当测得数据大于或等于设定的阈值,智慧巡检机器人会将报警信息传送至智慧控制终端,并以声光报警等方式提醒管理人员注意隐患,及时处理传感器自动归零校准。
(4) 具备巷道断面变形、沉降监测功能。
(5) 具备红外热成像功能,实时监测巷道设备异常情况。
(6) 具备巷道温湿度、粉尘、风速、烟雾、噪声、风压等监测功能。
(7) 具备现场环境图像获取功能,智慧巡检机器人可以实时获取巷道环境的高清图像。
(8) 具备语音播报,双向对讲功能。
(9) 具备车辆自身状态感知,包括电机转速、温度、故障预警,当前车速、续航里程等,能实时为驾驶员及监控中心提供车辆本身运行状态。
(10) 具备智慧车集群调度系统平台,可在多车同时运行时通过智慧车集群调度系统统一合理规划、部署。
(11) 具有鸿蒙物联网操作系统,并且在鸿蒙智慧屏规范合理显示,真正实现万物互联。
(12) 具备逃生自救功能,智慧巡检机器人在巷道巡检过程中如发生突发紧急事件时,监控中心的集群调度平台会启动逃生自救路径规划系统,通过科学合理地规划可为遇险人员提供合理的逃生路径,并通过声音及视频保留原始数据信息。
(13) 数据分析系统,数据监控平台可以自动整理、分析和统计所收集的数据,使管理人员能够在监控过程中方便地查询相关数据和检测报告,实现数据信息的便捷管理和有效利用。
智慧巡检机器人的主要技术性能指标如下:
(1) 适用领域:I 类防爆环境。
(2) 巡检速度:0~25 km/h。
(3) 防护等级:IP54。
(4) 通信方式:5G、4G。
(5) 续航里程:≥60 km。
(6) 巷道检测精度:±0.5% F.S。
(7) 甲烷测气有效距离:0.5~20 m。
(8) 测量精度:甲烷±5%(1~100),一氧化碳±2% (0~20),二氧化碳±0.05+5% (0.5~5),温度±0.4 (−40~120) ℃,湿度±3 (0~100)。
智慧巡检机器人关键技术
结合定位的多源异构数据采集标定及处理
智慧巡检机器人可实现的功能多达20 种,需要加载大量多种协议接口的传感器。然而,多传感器如何进行异构数据采集标定与处理是实现智慧巡检机器人智能化的重要前提。首先研究隔爆型智能数据采集终端,建立多传感器数据采集智慧化管理平台;然后对多种不同传感器同时刻采集数据时间轴归一化处理技术,实现不同传感器同步采集的数据校准;其次对传感器大量数据进行前处理,完成不同数据接口、协议的同步传输;最后结合定位信息,进行多传感器时域数据分析方法,实现智慧巡检机器人的智能感知。
基于激光雷达的巷道建模与巷道形变算法
巷道形变监测是智慧巡检机器人的重要功能之一。煤矿井下巷道具有典型的特征点单调重复等非结构化环境特征,如何利用三维激光雷达和辅助传感器完成巷道形变及沉降判定是智慧巡检机器人的技术难点。为此,笔者提出一种基于激光雷达的巷道建模与巷道变形算法,采用动态采集技术,研究巷道海量点云数据的处理及重构,可实现巷道变形及沉降的智能判定。
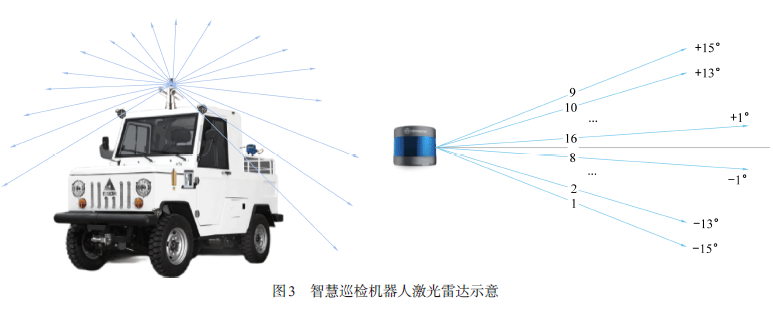
智慧巡检机器人在水平和垂直方向上安装了2个激光雷达,其中三维激光雷达可对巷道进行三维场景重建,并对二次建模图形进行点云匹配计算,从而判断巷道形变。智慧巡检机器人三维激光雷达示意如图3 所示。
激光雷达点云特征提取与配准
为解决巷道形变(片帮、顶板沉降、底鼓等)全数字化检测工作,需要3D导航地图、多线束扫描累积,即需要对巷道环境进行扫描及全数字化自主建模,以便为智慧巡检机器人的巷道沉积检测工作提供数据基础。采用多种点云技术、点云特征提取与分割的组合方法等,识别巷道壁面拱架、防护网、超欠挖;对智慧巡检机器人在巷道中的位置坐标进行准确监测及判断,以实现智慧巡检机器人精准感知、自主分析等能力要求。
巡检系统精准定位与逃生路径规划
在发生井下事故后,确定最佳的避灾救援路线并指导受灾人员安全撤离是当前矿山应急突发事故处理方法的研究重点,这可以最大程度地减少突发事故的影响和伤亡人数。而智慧巡检机器人具备逃生自救功能,其在巷道巡检过程中如遇突发紧急事件时,监控中心的集群调度平台会启动逃生自救路径规划系统,针对煤矿井下避灾救援路径的最优规划问题进行处理。智能巡检系统在初始阶段已经收集完成巷道的写实数据和三维巷道立体模型,根据灾害类别,更新巷道三维网图模型,构筑距离矩阵和序列矩阵,针对井下实时情况,给出逃生线路规划及逃生线路选择。并通过声音及视频保留原始数据信息。智慧巡检机器人设计的逃生路径如图4所示。

智慧巡检机器人应用
智慧巡检机器人以现有胶轮车为载体,搭载巡检所用的多种传感器,以满足巷道巡检需求,完成对井下巷道环境智能化检测。应用结合定位的多源异构数据采集标定及处理技术、基于激光雷达的巷道建模与巷道变形算法和火灾精准定位逃生规划等关键技术,保证了智慧巡检机器人功能的精确可靠。
提升煤矿生产安全与效率
相较于传统的矿用轨道式巡检机器人,智慧巡检机器人在煤矿井下具备计算机、传感器、自动化和信息通信等多重功能,不仅拥有多样化的巡检功能,适用于广泛的场景,能够减轻人工巡检的负担,同时可实现对巷道环境的同步观察和监测,对预防和减少巷道事故起到积极作用。
传统的人工巡检需要面对诸多风险和挑战,如气体泄漏、温度异常、粉尘爆炸等。而智慧巡检机器人不仅能够在恶劣的环境中持续工作,而且能够实现远程监控和实时传输数据,大幅减少了工作人员面临的风险。在减轻矿工体力劳动的同时,还能够更加安全地从事生产和巡检工作,大幅提高了工作效率。
此外,智慧巡检机器人能够实现全天候地工作,巡检频率大幅提高,相比之下,传统的人工巡检由于受限于工人的体力和实际作业时间,巡检频率较低,难以做到全面细致的监测。智慧巡检机器人不仅可以更早地发现潜在安全隐患,还可以对巷道和设备的运行状况进行全方位、无死角地监测和分析,使管理者可以更准确及时地了解到巷道环境的实际状况。
智慧巡检机器人还能够提供大量有关巷道环境和设备运行状况的数据,这些数据是煤矿安全管理和生产运营决策的重要依据,可以为企业提供更全面可靠的数据支持,帮助企业做出更加科学、有针对性的管理决策。
促进行业转型升级
智慧巡检机器人的应用有望在多个方面推动煤矿行业的转型升级。首先,通过智能化改造和机器人技术的应用,降低了人力成本,提高了工作效率和企业整体竞争力;其次,推动了煤矿安全管理的升级,智慧巡检机器人在每日例行巡检的同时,还可以进行实时监控和数据传输,提高了预警反应速度,有助于避免和减少事故的发生;最后,智慧巡检机器人的应用还将为煤矿行业注入新的技术活力,推动整个行业的技术升级与创新发展。
减员增效成果显著
智慧巡检机器人的应用改变了煤矿井下巷道的现有巡检方式,由固定的人员巡检转变为无人值守,自动化程度从原先的50%提升至现在的90%,巡检人员从3~4 人减少到1~2 人。在此过程中,巡检效率和预警准确率均提升了50%以上。此外,智慧巡检机器人降低了煤矿生产中的潜在危害,减少了非计划性停机造成的损失,保障了煤矿的正常安全生产,经济效益和社会效益明显。
鉴于国家、行业和地方对于工业机器人研发和应用的政策支持,不仅是煤炭行业,石油、化工、冶金等能源行业也迫切需要大量的安控巡检类智能机器人。随着技术的不断发展和应用场景的扩大,智慧巡检机器人有望在更多领域发挥作用,为各行各业带来更高效、更安全的工作环境。
- 相关推荐
