煤矿井下自动化钻探技术概况与智能化发展前瞻
时间:2022-01-12 作者:王清峰,辛德忠,陈航 来源:智能矿山网 分享:钻探施工是煤矿井下治理瓦斯、水害、冲击地压等常见灾害的主要手段,可为煤矿安全生产提供较好的保障。但是在钻孔过程中,煤与瓦斯突出、突发性岩石弹射与涌水等事故仍然难以避免,一旦发生,将严重威胁现场人员的安全。特别是在重庆、四川、贵州、河南、安徽等高瓦斯地区,瓦斯抽放孔施工过程中,突出事故频繁发生;在山东等冲击地压影响严重地区,防冲卸压孔施工过程中,时有岩石迸裂、抛出,安全隐患极大;在陕西等水害较多的矿区容易突发孔口涌水事故,存在较大安全隐患,而且人员长期处于探放水孔口,职业健康状况极差。
传统的煤矿钻机只能在近孔口位置操作,最远不超过10 m,各类孔口突发事故极易造成人员伤亡。此外,传统钻机自动化程度极低,劳动强度大,现场施工人员多,钻进操作过程繁琐,严重影响施工现场的安全保障和效率提升,已经成为智慧矿山建设的一大障碍。因此,智能化是煤矿钻探技术与装备发展的重要方向。近年来,国家相关部门发布一系列政策、文件,其中《煤炭工业发展“十三五”规划》将智能钻探技术与装备列为煤炭科技发展重点;国家煤矿安全监察局主导“科技强安行动”要求深入推进“机械化换人、自动化减人”;2019年,国家煤矿安全监察局发布《煤矿机器人重点研发目录》,鼓励支持研发应用煤矿机器人。
国外煤矿开展钻机自动化研究较早,20世纪80年代开始,美国、瑞典等国家的工程机械先进企业研发了多种煤矿或其他领域钻机的自动化技术。此后,随着计算机、网络、自动化等技术的高速发展,部分标杆产品已具备了自动装卸钻杆、远控操作和工况实时监控等功能。目前,阿特拉斯的凿岩台车是智能钻探装备的典型代表,已具备了钻臂全自动控制、自动装卸钻杆、钻孔过程自动检测等智能化功能。
国内煤矿钻机的自动化技术起步较晚,20世纪90年代才开始进行自动化升级、电控技术应用等传统钻机改造研究。2000年以后,以中煤科工集团重庆研究院有限公司为代表的企业和研究机构开展了钻机远程控制和自动化施工技术研究,突破了一系列技术难题,形成了较成熟的自动化钻探装备,取得了较好的现场应用效果。
智能化是煤矿井下钻探技术与装备发展的主要趋势,除了已有的自动化钻进、自动上下钻杆等技术,还需要在机器人化、数据智能分析、智能配套装置、集群控制等方面进行攻关。
1 煤矿井下自动化钻探技术发展概况
我国煤矿井下自动化钻探技术的发展主要经过了井下远距离手动控制、地面远距离手动控制、地面远距离自动控制、双模式自动控制等阶段。
1.1 井下远距离手动控制阶段
针对我国高瓦斯、突出矿井施工瓦斯抽放孔的安全提升需求,2005年,煤科总院重庆研究院以延长操作者与孔口、钻机间的距离为主要突破方向,采用加长液压操作台油管的方式,使操作者与孔口间的距离延长至15 m以上,相比传统近孔口操作有了一定的安全提升效果。但是,该研究方案对于距离的延长受液压系统特性限制极大:由于液压油管的延长导致液压系统延程损失增加,带来了系统发热严重,控制迟滞增加等问题。
2007年,煤科总院重庆研究院以承担国家发改委技术开发专项为契机,进行钻机电液联合控制和远程监控技术的研究,成功开发了“防突远距离控制钻机”。该钻机通过电磁阀驱动技术和有线网络连接,实现了井下150 m远控操作;通过操作上下钻杆系统实现了近水平钻孔的机械化钻杆输送与装卸;并采用压力传感器对钻机液压系统进行监测。该钻机是当时国内首套实现远距离操作的煤矿钻机。
以“防突远距离控制钻机”为基础,2009年,煤科总院重庆研究院承担了国家科技部科研院所技术开发专项“突出煤层钻孔远距离控制技术与装备”,继续在电液联合控制、钻杆自动输送等方面开展研究。突破了钻杆螺纹无损接扣、双夹持器卸扣装置、联动液压系统、电液联合控制系统等关键技术和装置,开发了一套具有初步实用性的井下远距离控制钻机。
井下远控手动控制阶段的研究初步解决了井下远距离控制和监控的问题,同时形成了自动上下钻杆技术与装置的雏形,但是仅适用于近水平钻孔,应用范围较窄。
1.2 地面远距离手动控制
井下远控钻机的研发对于提高井下钻探的安全性具有一定的提升作用,但是无法将现场人员转移到地面,无法减少下井人数。因此,地面远控成为了自动化钻探技术发展的下个阶段。
2010年,煤科总院重庆研究院通过“十一五”国家科技重大专项的研究,成功研制了“地面控制钻机”(图1),填补了国内外该领域的空白。该钻机将地面控制站接入煤矿综合环网,实现了在地面控制井下钻机施工;在实现地面对钻场进行视频监控的同时,还实现了地面与钻场间双向语音通信;采用自适应原理的钻杆螺纹连接技术,再次提高了钻杆机械化接卸扣的效率和接卸扣系统的可靠性。地面控制钻机于2009年2—3月在松藻矿务局石壕煤矿进行井下现场试验,试验总进尺近2 000 m,整机及各关键系统在试验中性能基本稳定,达到了预期效果。

图1 地面控制钻机
与仅能在井下150 m控制的“井下远控手动控制钻机”相比,“地面控制钻机”通过应用网络技术,大幅增加人与孔口的距离,最终成功地将操作者转移到了地面,对于减少下井人数有着阶段性的意义。但是,该阶段仍未摆脱施工过程,尤其是钻进过程,人工逐步操作的模式,距离自动化施工尚有较大差距。
1.3 地面远距离自动控制阶段
为进一步提高煤矿井下钻机自动化施工的能力,2013年,中煤科工集团重庆研究院有限公司通过“十二五”国家科技重大专项的研究,成功开发了“地面远距离自动控制钻机”(图2)。该钻机通过关节式抓取机械手配合可移动式钻杆箱输送钻杆,实现了0°~45°全自动装卸钻杆;以自动控制程序和传感器监测系统为基础,实现了钻进过程全自动执行;通过现场视频监控、超声障碍测距以及锚固压力监测等手段,实现了在地面控制钻机移动、锚固和调整钻孔角度。

图2 地面远距离自动控制钻机
“地面远距离自动控制钻机”是国内首次真正实现钻进、上下钻杆等关键工序自动化的煤矿井下钻机。同时,还初步具备了控制参数自适应调节、地面移机、锚固和姿态调节等智能化功能,再次提高了施工现场安全性。
发展到这一阶段,煤矿井下自动化钻探装备已经初步具备了推广应用的条件,已接近实用化、产业化,主要差距体现在工况适用性、施工效率、部分元器件的使用寿命等方面。
1.4 双模式远距离自动控制阶段1
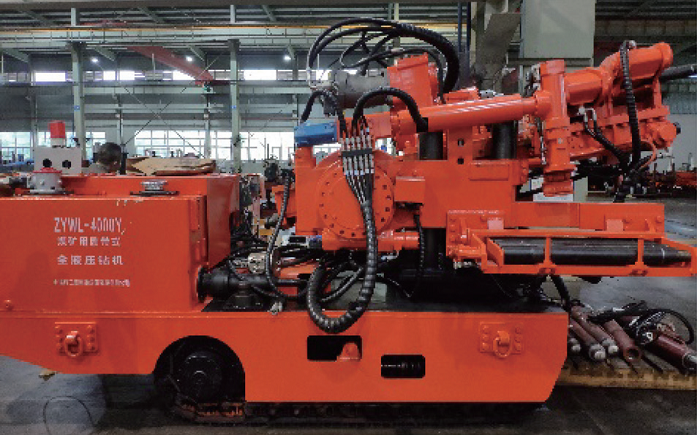
图3 遥控自动钻机
2014—2018年,以中煤科工集团重庆研究院有限公司为代表的国内企业继续深入研发可实用化的煤矿井下自动化钻探技术与装备,终于研制出了“遥控自动钻机”(图3)等产品,并在国内多个煤矿成功应用。遥控自动钻机以“十二五”地面远距离自动钻机为原型机,着重提升了现场应用的稳定性、适应范围和施工效率。该钻机引入井下无线通信技术,同时开发了便携式遥控器,形成了地面控制与井下无线遥控的双远控模式,以适应不同煤矿的现场需求;研发了3自由度关节式钻杆机械手,结合结构简单、可靠的顶开式钻杆箱,实现了-20°—+90°倾角范围的自动上下钻杆,可满足大多煤矿的钻孔设计要求;优化了自动上下钻杆流程,大幅缩短上下钻杆时间,提高了施工综合效率;初步开发了防卡钻技术,进一步提高钻进效率和稳定性;采用壳体防护、加强密封、线路优化等方法提高关键传感器寿命,提升控制系统稳定性。
“遥控自动钻机”初步实现了产业化,并在淮南矿业集团、平煤集团、神东煤炭集团、新疆焦煤集团等进行了小批量的现场应用。与传统钻机对比,可减少单机下井1~2人,减少单机班组6~7人,提高钻孔施工效率约20%,在提高施工安全性和减小劳动强度等方面具有显著作用。
1.5 双模式远距离自动控制阶段2
现场应用表明,阶段1的“遥控自动钻机”在钻杆存储容量、负倾角钻孔范围、上下钻杆效率以及控制系统布局等方面还有较大的优化空间。2018年起,依托重庆市重点产业创新专项,中煤科工集团重庆研究院有限公司展开了新一轮的“遥控自动控制”技术与装备攻坚,在阶段1的常规型遥控自动钻机的基础上,成功开发了全方位型遥控自动钻机(图4)。
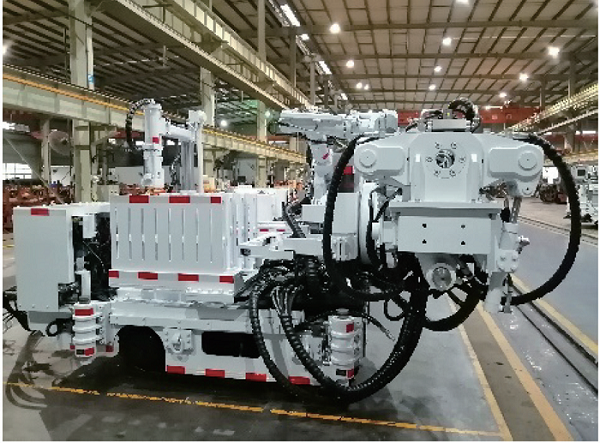
图4 全方位型遥控自动钻机
该钻机在保持全自动钻进、全自动上下钻杆、双模式远控功能的同时,采用双机械手配合多列钻杆箱的系统,大量增加了钻杆存储容量,可满足较深钻孔需求;通过多机构并行工序设计,提高了自动上下钻杆效率;采用回转减速器调节倾角、方位角,并合理布局机架和钻杆装卸系统位置,可适应-40°~+90°倾角、0°~±90°方位角钻孔范围;开发了模块化的液压阀组和电控系统,大幅简化液压管路和电控线路,减小了现场维修难度。
同时,该阶段的技术成果反哺阶段1的遥控自动钻机,形成了常规型与全方位型产品齐头并进的局面,为煤矿提供了多样化的选择。2019年起,遥控自动钻机在淮南、淮北、汾西、鹤壁等矿区得到了规模化的应用。与阶段1的遥控自动控制钻机比较,该钻机进一步提高了施工总体效率,施工过程中人员介入进一步减少,基本实现了正常施工时孔口无人化,为煤矿减人提效和安全生产提供了较为可靠和高效的自动化装备。
2 煤矿智能化钻探技术发展趋势前瞻
经过多年努力,国内企业在煤矿井下自动化钻探技术的研究与应用方面取得了一些阶段性的成果,突破了钻杆自动装卸、钻进过程自动控制、地面/井下远程控制等多项关键技术,并且形成了一系列较为实用、可靠的装备,较好地促进了钻探施工减人提效与安全保障。但是,由于井下钻场环境复杂,施工过程存在不确定性,因此,要全面实现智能化钻探还有多项难题有待攻克,包括工况智能感知、控制参数智能调节、工况参数智能分析以及智能钻孔装备集群控制等。
2.1 工况智能感知
钻探过程的工况智能感知主要包括设备状态智能感知、孔内工况智能感知以及现场环境智能感知等3个方面。
1)设备状态智能感知。现有的遥控自动钻机实现了推进、旋转、钻杆输送等关键动作的位置、位移监控以及液压系统压力等设备基本状态监控。但是,仅靠上述参数难以实现钻机实际工作状态的准确反馈,无法进行钻进智能控制。要实现设备状态智能感知,至少还需要对液压系统精确控制参数、电控系统控制电压、传感器电流与电压以及控制程序执行过程等进行实时监测与反馈。
2)孔内工况智能感知。孔内工况主要包括孔内煤岩种类、煤岩特性参数、瓦斯压力、围岩压力以及可钻性等,目前相关技术尚处于起步阶段,还未形成具有较强实用性的技术或装置。可适当借鉴石油、地勘等领域的先进技术,加以适应性转化和集成创新,采用岩层电阻率、γ射线、孔底视觉等方法实现相关孔内工况感知,为钻孔智能化设计和控制参数智能调节提供可靠依据。
3)现场环境智能感知。对于煤矿井下智能化钻探,施工现场环境的感知同样必不可少。例如:要实现自主移机、定位,钻机必须对周边障碍物的距离,巷道尺寸、走向进行准确感知;移机到位后,必须对孔位进行准确识别,为钻孔姿态智能调节提供准确目标;实时监测现场瓦斯等有害气体的含量,测量围岩压力等级,智能管控、预警非施工人员进入等意外情况,确保施工现场安全。
2.2 控制参数智能调节
钻进过程控制参数调节的合理性是成孔质量的优劣关键影响因素。钻进过程是一个复杂的时变过程,存在着诸多不确定因素,操作者很难根据大量离散且快速变化的因素做出参数调整的正确决策。而传统钻机的控制调节主要依据操作者的经验,由于人员技能参差不齐,成孔质量往往难以保证。
现有的遥控自动钻机实现了钻进过程的自动控制以及初级的预防卡钻功能,其本质是相关机构机械化的执行一系列预定流程,仍然缺乏对钻进过程的智能调整与自我学习功能,还无法对钻进中发生的突发情况进行处理。因此,控制参数智能调节应在钻进过程自动控制的基础上进一步研究参数调整规则、参数自优化、钻孔事故自动处理等技术。控制参数智能调节原理如图5所示。
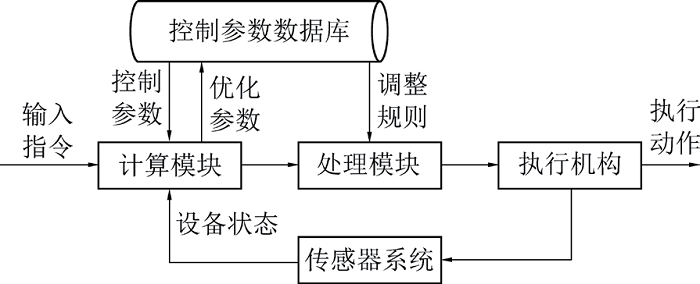
图5 控制参数智能调节原理
计算模块根据操作者或系统输入的控制指令从数据库中调取最适合的初级控制参数,同时处理模块根据钻孔设计信息调取相应调整规则对参数进行初次调整,执行机构执行相应动作,传感器系统将设备状态反馈给计算模块。若在钻进效率、设备稳定性、预期成孔质量等方面还有优化空间,计算模块将再次调整参数,并将调整后参数存入数据库,实现数据自优化。如此循环,直至控制参数达到系统规定的最优状态。
2.3 工况参数智能分析
现有的遥控自动钻机等设备已实现部分参数的自动采集、反馈与分析,并已初步将之运用到设备状态监测、基本工况判定和控制参数调整中。但是,仅限于此还无法满足智能化钻探的需求。需将钻孔过程中采集的各类参数应用到成孔质量评价以及钻孔设计优化的过程中,形成钻孔过程与成孔评价互补的良性循环。为实现该技术,需开展以下4个方面的研究:
1)多类型传感器与钻机控制系统集成技术。将瓦斯、应力、随钻轨迹等测量传感器从物理层面、数据层面与钻机控制系统集成,进一步完善设备状态参数、孔内工况参数等构成的工况感知向量集,为控制参数调整和后续钻孔优化提供更全面的数据支撑。
2)多源数据融合与智能分析技术。将工况感知等环节获得的大量数据分类、融合,是应用前必须解决的问题。首先要对数据进行分类和筛选。在判定数据有效性的基础上,进一步确定各类数据对应的参数控制功能,即哪些数据用于哪些参数调节的指导。然后需要进行数据优先级判定,主要是根据数据类型对某项参数影响的大小进行加权排序,便于在发生数据冲突时取舍,同时避免重复调节或冗余调节等影响效率的情况。
3)面向不同工况的钻孔评估方法。基于大量钻孔统计和控制参数数据,以各类灾害防治达标检测为目标,构建多源数据拟合、关联以及等效简化计算方法,建立基于瓦斯参数、煤岩特性、钻孔轨迹、钻进控制等多种参数的钻孔质量后评价数学模型。采用统计学方法,研究面向瓦斯、冲击地压、水害等不同治理对象的钻孔评估方法,并设定达标阈值。同时,建立与评价结果对应的钻孔设计优化方法,形成设计-钻孔-评估的闭环,不断完善钻孔设计方案,提高成孔质量。
4)数据分级实时传输与共享技术。工况参数智能分析技术在实际应用过程中,将面向一线操作者、煤矿直接管理者、煤矿职能部门、上级监管部门等多种对象。因此,在开发数据实时共享技术的同时,还应根据不同对象设置数据浏览、调阅、保存、修改等权限,从而形成多终端、分权限的数据实时管理体系。
2.4 智能钻孔装备集群控制技术
由于井下钻孔存在分散施工的特点,各钻场间有一定距离,现有自动钻机仍需独立配备操作员和辅助人员方可保证钻机正常运行。这种“各自为战”的情况已成为智能化钻探控制技术发展的一大瓶颈。
因此,研究智能钻孔装备集群控制技术可以更好地促进井下钻孔现场减人。
1)集群控制系统。首先需要构建集群控制软硬件系统。研究自动钻机群协同控制策略,开发集群数据分析模型和协同管理算法,开发集群控制系统软件与硬件系统,最终集成构建集群控制装备。
2)智能装备身份识别技术。对多个装备进行集群控制,准确识别各自身份信息是保证控制指令准确送达,现场工况及时反馈的关键环节。通过研究适用于煤矿钻机工况的装备标识技术,开发身份标识装置,实现群内钻机唯一标识。以此为基础,研究钻机群身份实时、快速读取技术,准确快速身份标识,实现数据分流,提高智能控制效率与准确性。
3 煤矿智能钻探技术发展所需的政策支持
智能化既是煤矿钻探技术发展的主要趋势,又是其有效解决方案。在人工智能、互联网、物联网、传感器等相关基础技术飞速发展的时代背景下,智能化钻探技术的研发与应用也将加速发展。政府从技术开发、科研立项、推广应用、转变观念等方面制定相关政策,进行引导、扶持,推动创新和应用,有助于尽早地实现煤矿智能钻探。
1)促进研发企业、机构跨行业、跨领域与智能物流、人工智能、智能汽车、航天科技等行业的领军机构交流,积极促进科研项目、技术转让等形式的合作,借助其他行业既有先进成果加速煤矿智能化钻探技术的发展。
2)相关政府机构设立高级别科研项目,加大研究经费投入,引导社会力量参与智能化钻探技术的创新。同时,鼓励企业、高校内部立项研发相关技术,定期组织评比优秀项目成果,给予一定财政补贴。
3)出台相关政策,促进研发、生产、应用单位多方协作,淘汰落后产能,鼓励智能化技术与装备的应用。对于采购智能化装备的生产单位给予一定的财政补贴、税费减免等优惠政策,加快较成熟智能技术与装备的产业化、市场化进程。
4)鼓励举办各种智能化钻探技术展会、论坛、学术会议、示范交流会等,促进煤矿从业者观念转变,提高一线人员对高科技装备的适应性,加快智能钻探技术与装备的普及。
4 结 语
从工厂生产线、物流运输、铁矿开采等其他行业的发展历程来看,智能化是煤矿井下钻探技术与装备发展的必由之路,也是亟待解决煤矿安全生产的先进技术,更是推动煤炭行业绿色、可持续发展的重要推动力。国家对此一贯重视,持续多年从国家层面立项,引导相关研究,取得了较好的成效,产出了一些值得推广应用的成果。目前,以淮南矿业集团、淮北矿业集团、平煤集团、兖煤集团为代表的国内煤炭企业已经开始批量地应用智能钻探装备,从应用层面较好地推动了智能化钻探技术的发展。但是,已有的智能化钻探技术仍有许多技术难点亟待解决,已应用技术的适用范围还有待拓展,已产业化装备的可靠性还需持续提升,智能化钻探技术研发任重道远。
- 相关推荐
