煤矿智能高效掘进施工方案与关键技术装备
时间:2024-02-04 作者:田胜利 来源:智能矿山网 分享:煤炭作为我国的兜底保障能源,其能源主体地位将在未来很长时期内保持不变。随着国内电力需求和工业发展的需求,煤炭资源的开采需求仍将持续保持增长趋势。为保障煤炭工业的高质量发展,煤矿智能化是煤炭工业发展的必然之路,也是我国实现“碳中和”目标的必然要求。2020 年2 月,国家能源局、国家发改委等八部门联合印发了《关于加快煤矿智能化发展的指导意见》,明确了煤矿智能化发展的3 个阶段性目标:到2021 年,建成多类型的智能化示范煤矿;到2025 年,大型煤矿基本实现智能化;到2035 年,各类煤矿基本实现智能化,建成智能感知、智能决策、自动执行的煤矿智能化体系。
煤炭机械制造技术作为煤炭企业生产力不可或缺的组成部分,是推进煤炭工业结构调整、促进产业优化升级和可持续发展的重要保障,是推动煤炭工业转型升级的重要引擎,煤炭机械制造水平的不断提升将有力地推进我国煤炭工业规模化和现代化的发展进程。煤矿掘进设备是煤炭机械设备产业的核心内容,煤机企业优化升级煤矿掘进设备体系,可有效促进煤炭企业的智能化、自动化发展。
煤矿掘进技术装备发展现状
前,矿井掘进设备的运行大多依靠人工操作,存在着诸多问题。其特点是:掘进巷道员工多,掘进速度低,设备自动化程度低,煤矿开采作业环境条件差,煤矿安全事故时有发生,危及企业职工生命健康。因此,优化掘进设备的控制体系,可大幅提高掘进工作面的安全系数和作业效率。
煤炭企业对掘进设备质量进行严格保障的同时,对掘进设备的功能也提出了更高的需求,要求煤机企业能够提供安全性更高、操作更简单、功能更全面的煤炭掘进设备。一方面是煤炭企业对于生产安全与生产效率的进一步要求,另一方面也是为了顺应煤炭企业工人对于工作环境要求不断改善的这一趋势。煤炭企业的现实需求促使煤机企业必须在传统掘进设备的基础上进一步加大科研投入,让掘进设备逐步向自动化、智能化的方向进行革新升级。此外,新一代信息技术的发展也为煤矿掘进设备向自动化、智能化方向升级提供了可能。未来,煤矿掘进的自动化和智能化水平必将快速发展。
国家对于煤炭智能化、绿色化开采的要求进一步加快了我国煤炭机械制造行业的发展,我国煤矿智能化建设尚处初级阶段,未来煤矿智能化掘进设备的市场空间巨大。在国家和地方产业政策的扶持下,煤炭行业机械化、自动化、智能化进程不断加快。未来,煤炭企业对于智能化掘进设备的需求会不断增加,也有利于煤炭掘进制造行业的长远发展。
智能高效掘进施工方案与关键技术装备分析
针对煤矿企业高效智能化的掘进要求,笔者团队基于煤矿智能高效掘进技术装备与复杂的煤矿掘进条件,制定了智能高效掘进施工方案,如图1 所示。该技术方案整体由EBZ 系列掘锚钻一体机(160/200/220/260) +智能远程控制系统+带式输送机用自移机尾+矿用除尘装置+辅助配套巷道机器人等组成。
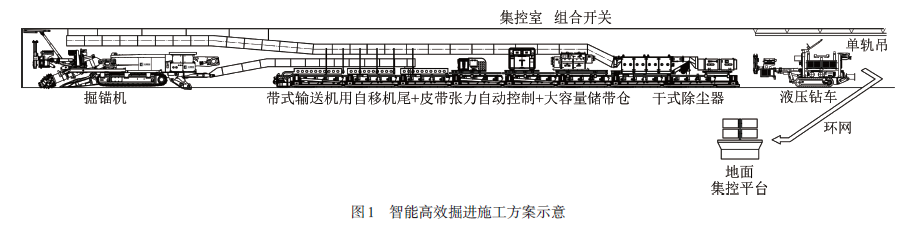
智能高效掘进施工方案中,掘锚机进行截割、临时支护、锚杆锚索支护、掘进工作面钻探作业;液压锚杆钻车在掘锚机后方补打锚杆锚索、进行单轨吊安装作业;带式输送机自移机尾搭载除尘系统自动进行前移;履带运输车或气动轻型单轨吊负责掘进工作面小型设备、材料运输;配套智能型干式(湿式) 除尘器,实现掘进迎头粉尘监测及治理;远程智能控制系统对掘锚机进行远程操控作业,具有视频监控、状态监测、故障诊断、声光报警、位姿监测、自动截割等功能。
智能高效掘进施工方案的掘锚机与智能化配套设备已广泛应用于国内多家煤矿企业,属于掘进专业中级以上,满足煤矿企业对智能化掘进建设的需求。该方案可以做到:①支护、运输等环节用人少,减少掘进工作面作业人数;②多机组配合机械化作业,有效提高掘进效率;③职工劳动强度显著降低;④综合机械化程度高,作业安全性显著提升。
EBZ 系列掘锚钻一体机(160/200/220/260)
在智能高效掘进施工方案中担当煤矿巷道高效掘进的核心设备为EBZ 系列掘锚钻一体机(160/200/220/260)(简称EBZ 掘锚机,图2),EBZ 掘锚机整机集掘进、临时支护、锚杆锚索支护、钻探等功能于一体,结构设计紧凑,综合机械化、自动化程度高。机载液压锚杆钻机布置在掘锚机本体架两侧行走部上方,掘进时,锚杆钻机位于回转台的后方,不影响截割作业;支护时,锚杆钻机通过两级纵移机构行进至截割头前方位置进行支护作业;前部钻机可施工顶帮锚杆锚索及卸压孔、探测孔,后部钻机可施工顶部锚索、帮部锚杆锚索及卸压孔等。
EBZ掘锚机集掘、锚、钻等多功能一体化,集成化程度高,满足掘进工作面不同作业需求。钻锚系统与掘进系统采用电气及液压系统两级闭锁,支护作业时自动闭锁截割电机及掘锚机液压系统,确保设备操作安全。锚杆钻机布置在掘锚机本体架两侧回转台的后方,保证掘进与支护作业互不干涉。支护作业时,锚杆钻机通过两级纵移机构移动至截割头前方,左右钻机可在不同排距内独立施工锚杆锚索。钻机配有顶紧、夹钎装置,钻机工作平稳,可以实现机械化拆卸钻杆。可选配锚索推进器,实现锚索安装自动推进。锚杆钻机具备手动及遥控2种操作方式,每部钻机均配有可随机移动的作业平台,操作安全方便。
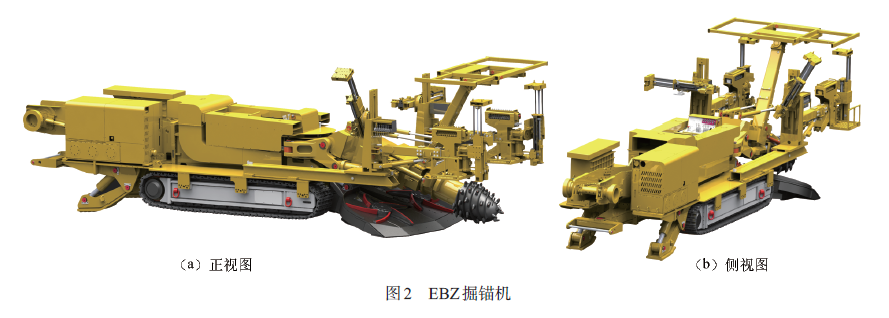
机载临时支护装置采用单主臂伸缩,额定支撑力可达30 kN;支护顶架采用回转缸调平结构,左右翻转±25°,前后翻转0~120°,接顶效果好,满足煤矿不同形状巷道断面使用要求。
智能远程控制系统
智能远程控制系统是决定智能高效掘进施工方案智能化水平的关键,智能远程控制系统融合机器视觉、惯性导航、运动控制、智能感知与精确定位等多种监控技术,具有全方位参数智能感知、状态监测与故障诊断、自主导航与纠偏、自动截割与远程操控、全流程一键启停控制、多系统融合联动等功能,可实现掘锚机高精度定向、位姿调整、自适应截割及掘进环境可视化,具备井巷掘进作业设备机群自主决策控制功能,形成掘进工作面掘、支、锚、运高效协同、一键启停、自动掘进、自主决策与智能控制的智能掘进作业体系。着力构建数字化、虚拟化透明工作面,打造“位姿监测数字孪生,视频监控辅助作业、边缘计算智能规划”的超视距智能远程控制新型工作模式。
EBZ掘锚机智能远程控制系统主要由掘进设备、井上井下集控中心及软件系统组成。智能远程控制系统主要实现对悬臂式掘锚机的智能视距遥控和远程遥控,从而减少煤矿掘进工作面作业人员,实现少人化智能化掘进,保障矿井安全高效生产。为实现煤矿的智能化发展,笔者就智能远程控制系统的位姿监测、自动截割、网络传输、故障自诊断方面进行了研究。
(1) 位姿监测系统
EBZ 掘锚机定位导航装置采用“惯性导航+视觉测量+激光测距”的掘锚机导航定位方案,分为激光导引和位姿测量2 个组件,整体方案如图3 所示。该方案以安装在掘锚机上的惯导组件为导航定位的核心,并在掘锚机上方安装定位光靶。在掘锚机后方的悬挂安装激光测量装置,通过测量定位光靶,对掘锚机进行实时位置测量和定期精确修正,进而实现长时间高精度的导航、定位功能。
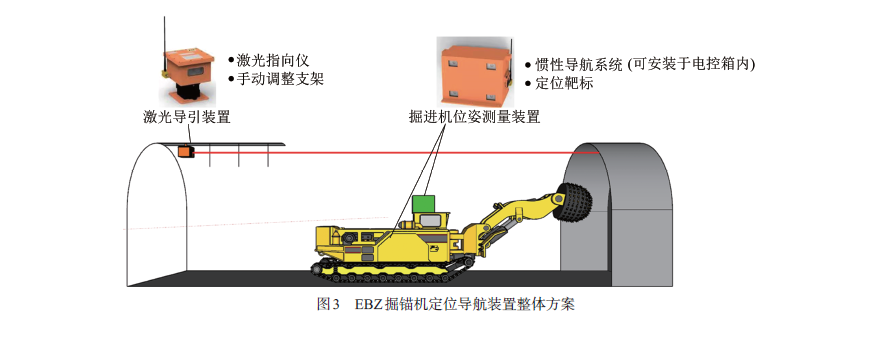
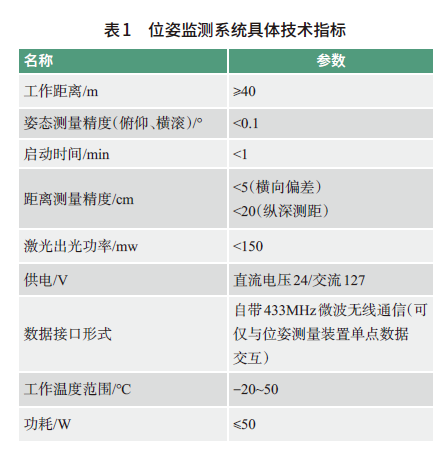
EBZ掘锚机机身位姿参数主要包括:车前距离、掘锚机坐标、掘锚机坐标、横滚角、俯仰角、航向角及设备状态等数据。EBZ掘锚机具备自主导航功能,通过测量和计算掘进设备的航向、姿态、速度、位置等信息,自动修正,可实现沿设定方向自动掘进。在掘进过程中,位姿监测系统可自动进行位置更新,实现精准实时定位。掘进设备定位显示界面如图4 所示,位姿监测系统具体技术指标见表1。

(2) 自动截割系统
根据巷道实际条件、记忆截割路径及控制工艺,可实现巷道全断面多循环定位截割,巷道成型标准化,巷道成型误差≤10 cm。
截割轨迹在线监测,可建立巷道断面模型,利用传感器单元获取掘锚机位姿状态信息,如截割头到EBZ掘锚机中心坐标轴的坐标、EBZ掘锚机中心坐标到巷道坐标等,经控制单元计算出EBZ掘锚机截割头实际位置,在误差范围内准确地实现截割位置轨迹监测,掘进机位姿误差<0.02°,航向角误差<0.1°。截割自适应具备EBZ掘锚机的截割自适应功能,基于截割负载、掘锚机振动频谱、液压系统压力等,自适应控制截割臂摆速。
远程操作平台和EBZ 掘锚机之间采用无线通信+有线光纤通信组合的方式,控制距离不低于2 000 m,响应时间不大于100 ms。遥控控制采用无线方式实现,控制距离不低于100 m,响应时间不大于100 ms,视频图像延时小于300 ms。
EBZ掘锚机本体安装矿用本安型无线通信基站(WiFi6),在EBZ掘锚机后方安装1 台矿用本安型无线通信基站,通过光缆与井下可移动操作室连接,实现控制数据与视频数据的有线无线相结合的传输方式。方便掘进迎头网络延伸。
采用网管千兆交换机,针对控制数据和视频数据的类型和要求,划分VLAN单独管理,保障控制数据与视频图像时延低, 智能化掘进设备具有CAN、RJ45、RS485 通信接口,支持Modbus RTU、Modbus TCP、TCP/IP等通信协议。
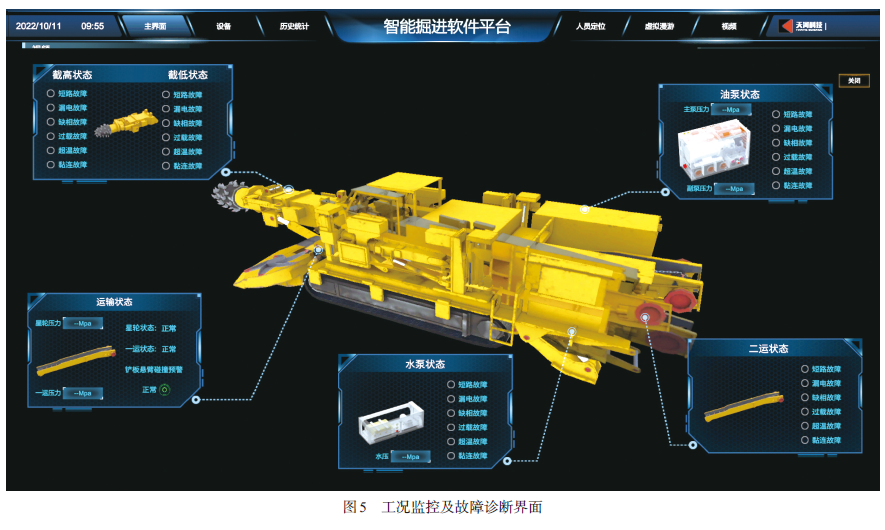
(4) 工况监测故障自诊断功能
通过实时采集EBZ 掘锚机的电压、电流、油温、油位、瓦斯等关键状态信息,并在机组上安装第一运输机和星轮压力传感器,当数据超过门限值时,发出声光报警,甚至停机,并实时在人机界面显示报警信息(图5)。实现对铲板星轮、第一运输机、第二运输机、截割电机、油泵电机工作状态的监控,以及EBZ掘锚机电气故障自诊、定期维修保养提示及信息推送功能。
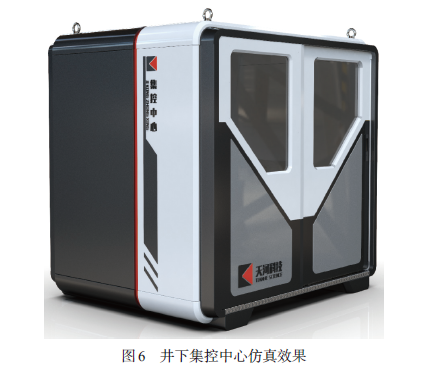
EBZ掘锚机远程操控集控中心包含井下集控中心和井上集控中心,井下集控中心(图6) 由远程控制室和控制柜组成,包括交换机、矿用显示器、矿用硬盘录像机、矿用计算机主机、本安型远程操作箱等。在井下集控中心能够控制掘锚机各种动作:油泵电机启停、截割电机启停,液压部分工作(截割升降、截割回转、铲板升降、行走、后支撑升降等),第一运输机启停、第二运输机转载输送带启停、机载除尘设备启停等,遥控器包含掘锚机所有操作功能,并具有断电和通信中断保护功能。
井上集控中心(图7) 由音视频存储处理设备、工控机、光纤交换机、高清液晶显示器、操作台等组成。操作台上设置一套和EBZ掘锚机操作手柄基本一致的操纵杆,用于干预操作,设置全高清液晶面板,用于井下视频显示。由地面远程控制台和EBZ掘锚机远程控制监测软件系统组成,控制台放置在地面集控中心室,操作人员位于地面,通过观察显示器视频图像和掘锚机状态信息,远程控制掘锚机、机尾自移系统、干式除尘系统工作。控制台由高性能主机服务器、显示器、掘锚机智能操作箱、网络交换机等组成,可实现掘锚机图像检测、状态检测、远程控制、巷道定位、自动掘进的功能。

配置地面远程控制平台,安装全高清液晶面板显示屏,显示画面与井下集控中心显示画面一致。安装与井下集控中心相同的操作台,对掘进工作面相关设备进行远程集中控制,可实现掘进设备“一键启停”智能操作。配置与井下集控中心配套的智能控制软件平台,具备OPC等通用数据交换接口,可将掘进工作面的数据实时传输到煤矿智能化集控平台。
配套自移机尾
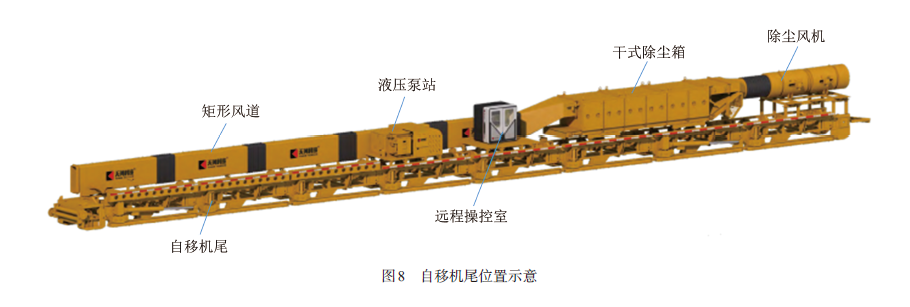
掘进系统需要自移机尾来实现EBZ掘锚机等掘进设备与输送带传输系统的衔接,达到煤矿掘进的智能化、自动化的基础要求。
自移机尾位置如图8 所示,可搭载掘进集控室、除尘风机及刚性吸尘风道,有效解决设备的布置及挪移等问题。推移装置采用首尾两组推移油缸,推移力大。自移机尾搭载掘锚机电缆拖链,电缆移动方便。采用型材框体结构,在保证强度的同时减轻了质量,接地比压小。底部过煤空间大,可避免移机过程中频繁清理浮煤,遥控操作,具备一键自移功能。
配套矿用除尘装置
干式除尘设备相比湿式除尘设备除尘效率更高,主要针对粉尘浓度高特别是呼吸性粉尘浓度高的情况,湿式除尘设备难以解决巷道掘进的粉尘治理情况。
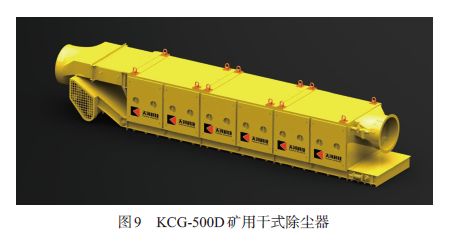
采用KCG―500D 矿用干式除尘器搭载自主设计的智能PLC控制主机,保障了除尘效果的可靠性且免维护。智能PLC 控制主机还具备运行状况显示、控制参数设定、瓦斯超限断电保护、风水延时控制、控尘状态自动切换等功能。采用平板式褶式滤布滤芯,相同过滤面积下,设备体积相对较小,空间利用率高。采用滤袋旁插结构,更适合在煤矿井下巷道高度有限空间进行滤袋更换、检修;特殊滤布材料,防水防静电,除尘效率≥99.5%,呼吸性粉尘除尘效率≥90%。KCG―500D矿用干式除尘器如图9 所示。
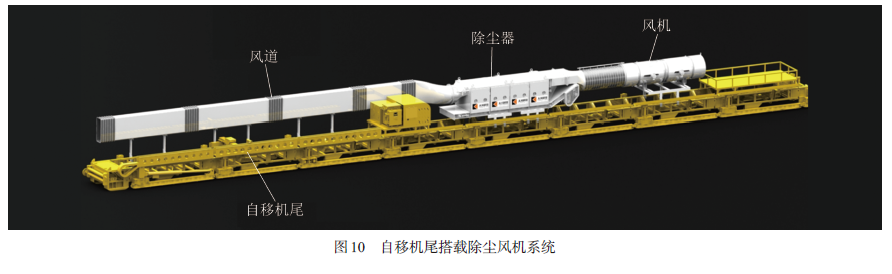
除尘器的承载移动可采用气动单轨吊吊挂、履带承载架承载、自移机尾承载、滑橇挪移等方式,自移机尾搭载除尘风机系统如图10 所示。
其他配套巷道机器人设备
智能高效掘进施工方案的实现离不开各类煤矿机器人的辅助。
CGYJ―24/4.5Y型矿用轨道梁辅助安装车(图11) 主要用于单轨吊轨道梁安装、补打锚杆锚索、管线安装维护等作业。其配有宽敞独立的升降作业平台,平台上部配备储梁仓和举升机械手,便于轨道梁的托举安装作业。锚杆钻机可以施工任意角度的钻孔,液压系统采用负载敏感变量泵配比例阀,可减少能耗及发热,功率智能分配更合理,钻机转矩350 N·m,转速500 r/min,钻进效率高。钻机配有液压卡钎器及顶紧装置,通过夹钎器夹紧钻杆,操作手柄反转钻箱可以快速拆卸钎杆,降低工人劳动强度。安装车的行走、前部支腿、后部支腿的操作均为遥控控制,操作安全且方便。安装车宽度1.2 m左右,适应性强,可以与多种掘进设备配套作业。
巷道多功能作业车(图12) 以防爆柴油机为动力,可在爆炸性气体环境中使用,设备采用隔爆电起动、电保护,安全系数高。配有安装升降平台和物料运输平台,物料运输平台包括车斗及吊臂,可用于轨道梁、管路、锚杆锚索等转场运输;升降平台采用“之”字型结构,升降平稳,在倾斜巷道中使用平台处于水平状态,可用于巷道单轨吊梁检修及安装作业、电力系统维护的高空作业等。
矿用钢棚辅助安装车(图13) 配有举升臂、托梁架及升降作业平台,适用于架棚巷道钢棚的辅助安装作业,设备可遥控操作,遥控距离30~50 m。
矿用管路辅助安装车(图14) 配有三级仿人机械臂、内错式机械手及作业平台,可以进行管路的夹持、举升和对接等,代替人工进行井下管路安装作业。采用三级铰接式机械臂进行管路夹持、举升,适应不同的管路直径,最大抓举质量500 kg,抓举高度4.5 m左右。机械手内部配有聚氨酯轮,可防止管路夹伤,便于用管路转动。具备遥控、手动2 种操作方式,操作安全、方便。动作互相闭锁,即行走时无法抓举,抓举时无法行走。配有防倾覆支腿,防止作业时设备发生倾覆。整机宽度仅1.2 m,通行方便。配备可升降的站人平台,便于管路安装。

总 结
近年来,我国煤矿掘进呈现出技术现代化、生产规模化及队伍专业化的发展趋势,未来也必然会向着高性能的设备发展,以更好地促使高效生产。在煤矿掘进机械化程度不断提升的同时,相关技术装备智能化自动化水平也必将更进一步的发展,如更高精度、更流畅的自动化掘、支、锚、运等工序,更高清晰度、更稳定的视频监控系统等。随着各大煤机企业加大科研力度投入,相关技术装备不断改进、革新发展,煤矿掘进领域未来的发展前景非常广阔。
煤矿掘进先进技术设备的研究与应用促进了智能化高效掘进施工方案的实现,对提高施工效率、降低成本、减少人力和资源浪费等方面具有重要意义与优势。山东天河科技股份有限公司始终坚持创新成就梦想、科技引领未来,以科技为先导,以质量为生命,以服务为核心,专注煤矿巷道装备创新20 年,聚焦煤矿高端智能装备进行深入研发。通过使用先进的技术和设备实现更精准和可控的施工过程,,提高安全性和环境友好性。智能化高效掘进施工方案可以应用于各种地质条件和施工场景,为工程建设提供更高效、可持续和创新的解决方案。
EBZ掘锚机的智能化发展对于地下矿山和隧道工程的发展具有重要意义。通过传感器技术的应用、数据处理和分析技术的发展、自动化控制技术的应用和人机交互技术的改进,可以提高EBZ掘锚机的工作效率、操作安全性和稳定性,为地下矿山和隧道工程的发展提供有力支持。
- 相关推荐
