煤矿本安型轨道式巡检平台研制与应用
时间:2023-09-07 作者:任伟 来源:智能矿山网 分享:2014 年4 月,黄陵矿业集团有限责任公司一号煤矿1001 综采工作面“以采煤机记忆截割、液压支架自动跟机及可视化远程监控为基础,以生产系统智能化控制软件为核心,实现了在地面(巷道) 综合监控中心对综采设备的智能监测与集中控制”,确定了“有人巡视、无人操作”的远程可视化割煤的技术路线。为了进一步实现“无人巡视”,借助于煤矿输送带、巷道巡检机器人的应用经验,笔者重点将对综采工作面巡检机器人进行研究。
商德勇等对薄煤层综采工作面巡检机器人的行走机构、跨沟、越障等方面的动力学建模和分析进行了系统性研究,为工作面巡检机器人的研制提供了理论与科研基础;张树生等进行了工作面柔性轨道和机器人的防爆设计的研究;李森等进行了链牵引传动综采工作面巡检机器人的研究与实践;郝勇等设计了一种工作面悬轨支撑结构及巡检机器人本体,并进行了井下试验,另外还有一些工作面巡检机器人的发明创造,这些研究虽然取得不少成果,但距离常态化应用仍有不小差距。工作面巡检机器人到底需要具备什么功能,执行什么标准都是行业所关注的和待确定的问题。
2019 年1 月,原国家煤矿安全监察局制定公布了《煤矿机器人重点研发目录》,对掘进、采煤、运煤、安控和救援5 类、38 种煤矿机器人,分别提出了具体的研发应用要求,希望通过“机器换人”来实现煤矿作业的“少人则安”和“无人则安”。工作面巡检机器人位列重点研发目录,其基本要求为:研发适用于井下回采工作面作业环境巡检机器人,具备自主移动、定位、图像采集、智能感知、预警、人机交互等功能,实现煤壁、片帮、大块煤、有害气体、温度、粉尘、设备状态等监测;另外,近几年与“透明工作面”“数字孪生”等智能化开采理念相关的三维地质重构、顶底板线提取、直线度检测也需要借助于巡检机器人的机载激光扫描雷达、惯导等获取数据支撑。2021 年4 月6 日,国家矿用产品安全标志中心有限公司发布了《煤矿井下机器人安全标志管理方案》《煤矿井下机器人基本安全要求(试行)》,又对煤矿机器人提出安全要求,相关要求进一步明确、标准不断完善。
至此,工作面巡检机器人的功能、安全标准等方面有了统一的要求,机器人研究有了明确的方向。但因工作面环境复杂多变,巡检机器人要实现的功能众多,无法将所有功能通过单台设备集成后满足煤矿安全标准要求。结合智能化综采工作面机器人巡检的需求,为满足因工作面特殊条件对巡检机器人提出的小体积、低功耗、模块化、多功能等要求,解决机器人替代人工巡检的技术难点,笔者提出了一种综采工作面通用化的本安型轨道式巡检平台,可选择性加载不同本安型设备,即可实现工作面不同的巡检功能,由此衍生出视频巡检机器人和三维扫描建图机器人,并进行了井下工业性试验。结果表明:该平台通用性强,标准化程度高,集成简单,可实现“1+N”的多功能巡检机器人的集成应用,为工作面机器人巡检提供了模块化、标准化解决方案。
本安型巡检平台结构与工作原理设计
本安型巡检平台采用柔性轨道、柔性化驱动平台、直流无刷空心杯电机驱动、快速更换电池供电、隔离RS485 接口等设计,实现了通用化平台的自主行走。
柔性轨道
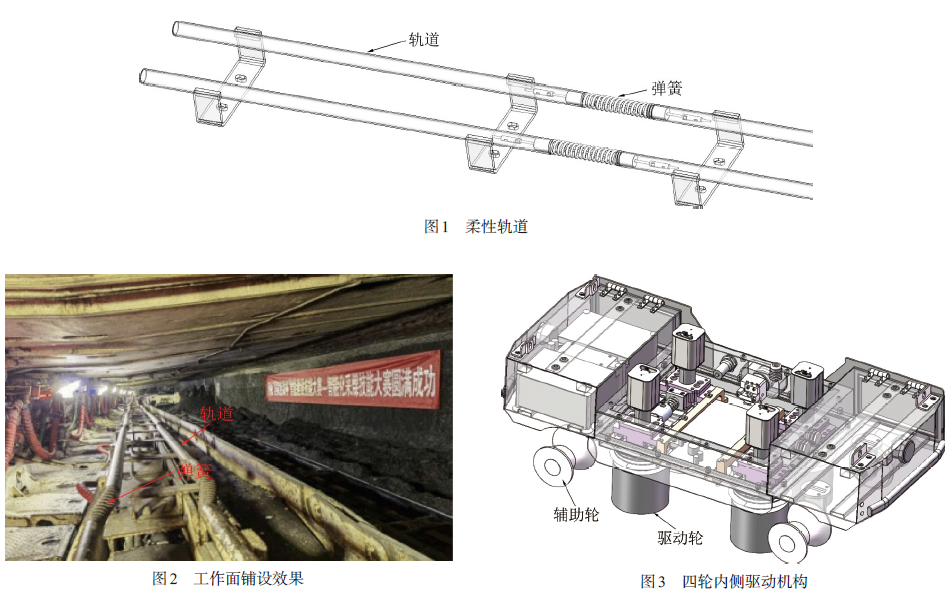
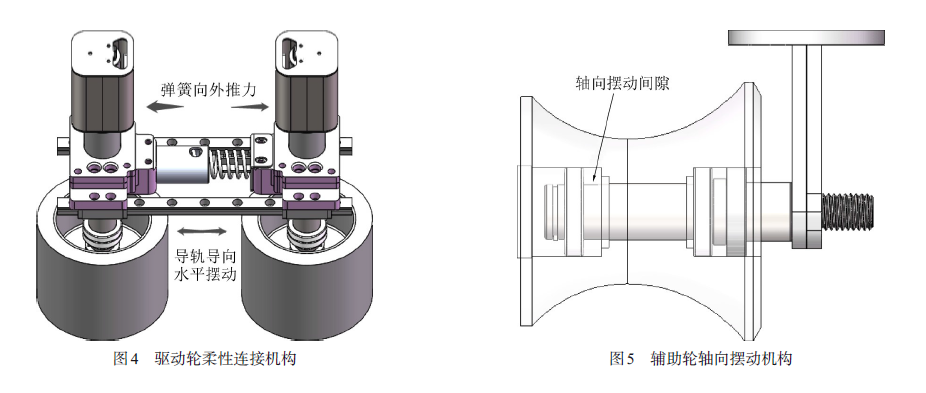
笔者介绍的本安型巡检平台是基于一种柔性轨道(图1)的自主移动平台。轨道由2个平行的ø45 mm圆形钢管通过U型板焊接成型,长1.3~1.5 m(根据支架的宽度选型)、宽240 mm,固定在刮板输送机靠近支架一侧,两两轨道之间使用自由状态下长210 mm、连接状态下长度压缩至170 mm的弹簧连接, 横贯整个工作面, 可适应工作面的地质变化(图2)。
柔性化驱动平台
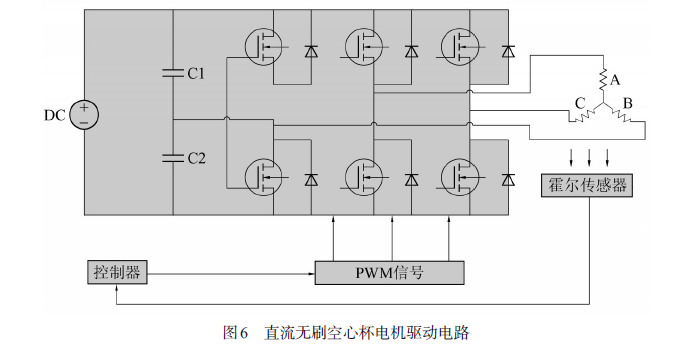
柔性化驱动平台采用四轮内侧驱动(图3),两两成一组,每组驱动轮机构之间用弹簧连接坐在2条平行滑轨上,由于弹簧的弹力,轮子受力紧靠在轨道圆管内侧,轨道连接处的弹簧间距变化(收紧或扩大) 时,两轮会自动调整间距,保证驱动摩擦力的同时也可保证平台不会侧翻掉落轨道;另外轨道上方的4 个辅助轮可轴向摆动,保证辅助轮的U型面能与圆管轨道充分接触,确保运行的稳定性。柔性化驱动平台的设计要点包括柔性驱动轮弹簧选型设计和辅助轮轴向摆动机构设计。
(1) 柔性驱动轮弹簧选型设计
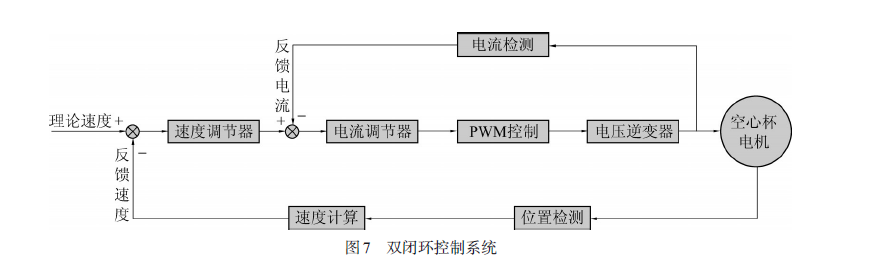
柔性机构全靠弹簧的外撑弹力使驱动轮紧贴双圆管的内侧,如图4 所示,电机输出转矩要同时克服驱动轮和辅助轮的滚动摩擦力才能带动平台移动,因此要注意选型设计。本安型巡检平台的直接动力是主动轮的静摩擦力,滑动摩擦力近似于最大静摩擦力;平台的爬坡阻力由其自身重力在运行方向的分力、主动轮和辅助轮的滚动摩擦力组成。
在柔性驱动轮弹簧选型时,首先要进行受力分析得出平台运行最大阻力,进而得到主动轮静摩擦力(主动轮静摩擦力须大于最大运行阻力,同时根据电机扭力总和大于主动轮静摩擦力可选型电机转矩);其次,确定平台+机载设备的质量和爬坡角度,再由主动轮静摩擦力得到平台运行时的弹簧压力;最后,通过弹簧的通用公式,选用合适的压簧材质,即可计算出中径、原始长度、压缩长度等合适的弹簧参数,以保证柔性驱动机构的稳定性和可靠性。
(2) 辅助轮轴向摆动机构设计
U型辅助轮能与圆管充分贴合起导向作用,同时辅助轮轴向留有一定的摆动间隙,使其可以水平自由摆动,以适应轨道弹簧连接处的宽度变化,辅助轮轴向摆动机构设计如图5 所示。
直流无刷空心杯电机驱动
电机及其驱动器作为本安型巡检平台驱动执行单元,选用直流无刷空心杯电机,其转矩特性良好、功率高、宽电压供电、使用寿命长,效率高达90%以上。此外,相间电感在微亨级别与限流电路结合,能量可完全满足GB/T 3836.4 I 类电感电路最小点燃电流要求。直流无刷空心杯电机驱动电路如图6所示。
为保证控制系统的稳定性,采用转速、电流双闭环控制方式,如图7 所示。当产生动态响应时,外环速度环可使实际转速持续跟踪给定转速,减小转速偏差。在实际运行过程中,电机启动瞬间或发生堵转时均会产生较大电流,电流调节器可将检测到的电枢电流反馈给控制系统,起到限制电枢电流的作用,使电机以允许的最大电流启动。
快速更换电池供电电源
本安型巡检平台由多组本安型磷酸铁锂电池供电,电池管理系统(BMS) 进行电池组电压、电流、电量和温度等信息的采集,通过串口与上位机通信;同时控制单体电池间的电量均衡,提供电池的过压、过流、过温、短路、断路等故障保护。电池组输出通过DC/DC 变换器稳压,再经过双重过压、过流保护,限制火花能量实现本安输出,本安电池电源系统如图8 所示。
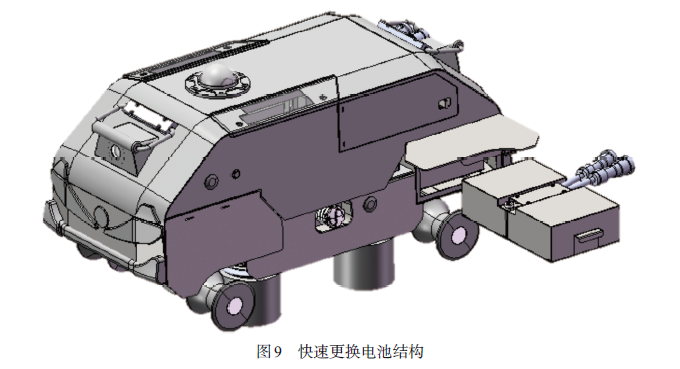
电池组采用快速更换结构,需要更换电池时,通过旋转外壳上电池仓盖的机械旋钮打开电池仓,将电池抽出,打开快插头即可快速更换电池,如图9 所示。
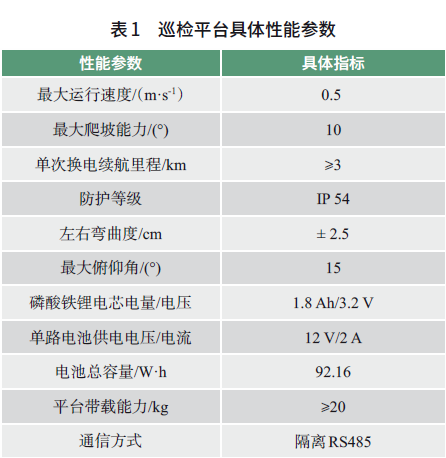
本安型巡检平台性能参数
通过结构的优化设计、分散式供电和电路本安设计,使本安型巡检平台在满足本质安全型的前提下具备现场使用的性能要求,具体性能参数见表1。
本安型巡检平台控制系统
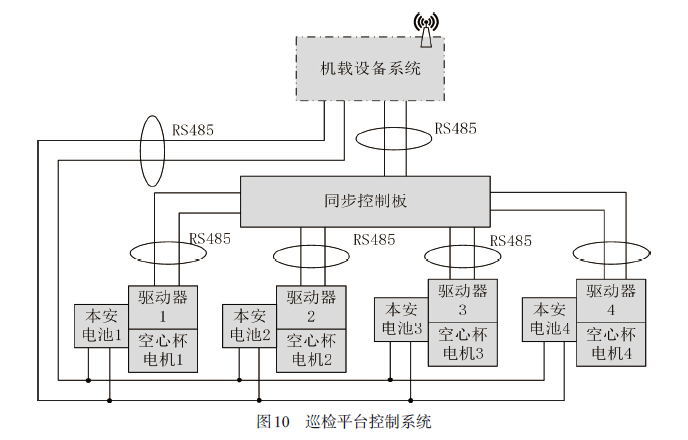
本安型巡检平台对外提供两路隔离RS485 接口,分别用于上传电池电源信息和电机的控制,采用Modbus RTU 协议,通过机载的信号转换模块,将RS485 信号转换成WiFi 信号或5G 传输给远程操作终端。本安型巡检平台控制系统如图10所示。

本安型巡检平台的扩展与应用
本安型巡检平台是一款本安型自主移动通用平台,对外提供隔离RS485 接口,可以与其他通过安标认证的机载设备进行系统集成,包括:搭载视频系统可成为视频巡检机器人;搭载雷达与惯导系统成为三维扫描机器人;也可搭载其他设备如双视(可见光+红外) 融合摄像仪、毫米波雷达、全景相机等,实现1 个平台+N个系统自由组合的综采工作面多场景无人巡检的应用。
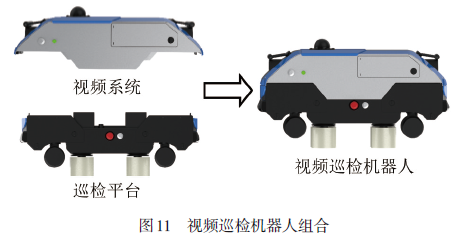
本安型巡检平台+视频系统
本安型巡检平台搭载视频系统即视频巡检机器人(图11),包括高清摄像仪、热红外成像仪、拾音器、气体等多种感知设备,支持远程控制和自主跟机巡检,实现工作面视频、声音、温度的采集,有效替代巡检人员。
试验所在综采工作面采高3.6~3.8 m,轨道顶部距离地面约1.7 m,轨道顶部距离顶板约2 m;轨道总长约300 m,经过轨道螺丝调整规避了轨道错茬过大情况,进行了巡检运行测试和数据采集。视频巡检机器人工作面应用如图12 所示。
工作面第8 架、56 架、103 架、146 架安装4 个5G基站,5G天线安装在巡检轨道正上方无遮挡位置,实现全工作面3.5G频段5G信号覆盖。

视频巡检机器人连接工作面5G网络,在工作面集控中心主机可远程控制巡检机器人的运行,设定最大运行速度为0.35 m/s,实际最大运行速度为0.343 m/s。
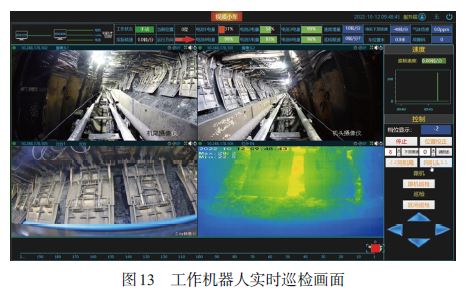
经过连续7 d 的测试,本安型视频巡检机器人(机载视频系统单独供电) 在工作面常态化运行,续航时间3.5 h,续航里程4.5 km,传输图像清晰,数据通信延时<350 ms,具备远程遥控和自主跟机巡检功能,可以替代人进行工作面可视化巡检。工作机器人实时巡检画面如图13 所示。
本安型巡检平台+雷达与惯导系统
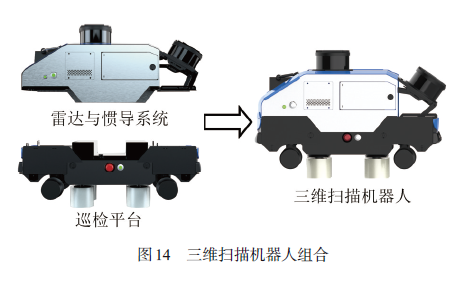
本安型巡检平台可添加雷达与惯性导航系统,通过搭载高精度MEMS惯导、激光扫描雷达、高性能处理板等多种设备,远程控制下可实现在线实时建模与离线自主扫描,构建三维模型。三维扫描机器人组合如图14 所示。
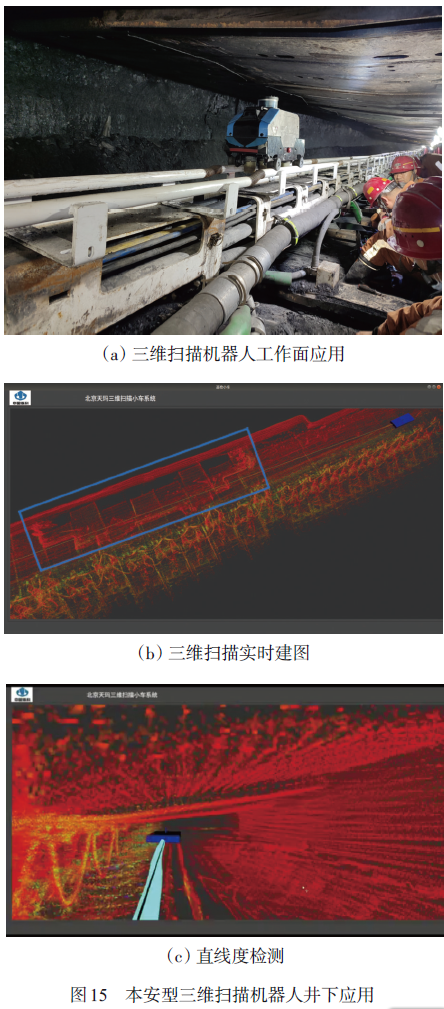
三维扫描机器人试验选在一个典型的薄煤层工作面展开,采高1.3~1.8 m,工作面宽5 m,工作面共有液压支架144 架,每架宽约1.75 m;沿工作面的电缆槽上安装有双钢管柔性轨道,三维扫描巡检机器人运行在轨道上;轨道布置长度为6~138 架;工作面WiFi 全覆盖,机器人通过WiFi 与地面的三维算法服务器数据交互。
本安型巡检平台配合三维激光扫描雷达和MEMS惯导经过了井下工业性试验(图15a),实现了自动实时三维地质建图(图15b,框处部分为采煤机) 与直线度检测(图15c),充分验证了雷达、
惯导的硬件组合方案+自主SLAM 算法的可行性,三维建图精度达到0.3%,直线度检测精度达到每200 m误差不超过0.4 m。
结 语
随着智能煤矿建设,综采工作面自动化程度越来越高,逐步向着“少人化”甚至“无人化”发展。为了进一步提高生产效率和保障人身安全,工作面巡检机器人势必会成为工作面不可或缺的“小帮手”,将现有的巡检工作由“有人巡视”转变为“无人巡视”。通用性巡检驱动平台的开发,使巡检机器人功能扩展更容易、集成更简单。
本安型巡检平台采用柔性内驱机构的设计,结合柔性轨道,能很好地适应工作面的地质变化;电池电源供电,快换电池续航,轻便易维护,特别适用于薄煤层无人巡检。选择性搭载视频系统、激光扫描雷达和惯导系统,实现工作面的视频监控和三维地质建图、工作面直线度检测,通过了井下工业性试验验证。笔者介绍的“积木式”设计的巡检机器人解决方案,是通用平台+机载功能设备的新尝试,实现了“1+N”的巡检组合,为工作面巡检机器人的开发与应用提供了新思路、新方法。
- 相关推荐
