移动式三维激光SLAM 技术在工作面测量的方案设计
时间:2025-04-25 作者:王迪 来源:智能矿山网 分享:SLAM定位与地图构建技术是机器人和计算机视觉领域的关键技术,目前SLAM技术已经应用到煤矿井下的移动机器人导航、扫描设备和无人运输车等多个场景。煤矿井下环境复杂多变、非结构化等特点,空间狭长且照明不均匀,对SLAM技术在煤矿井下应用提出了严峻挑战。
煤矿井下综采工作面狭长、密闭且非结构化或半结构化环境中,SLAM技术通过激光雷达、摄像头、惯性测量单元等传感器实时感知周围环境,基于感知数据构建环境地图,实现机器人或设备精确定位。快速获取被测物体表面三维坐标,生成高精度、密度大的点云数据。构建复杂巷道模型,实现巷道环境的精确建模和障碍物检测。高精度位置和方向信息,满足综采工作面设备定位需求;随着设备的移动,SLAM系统实时构建周围环境的三维地图,帮助操作人员了解工作环境,为路径规划和避障提供依据;结合路径规划算法,实现设备自主导航、减少人工干预,提高作业效率和安全性。
SLAM 技术应用的关键要素
煤矿井下综采工作面封闭复杂环境中,GPS 信号无法覆盖,SLAM技术可实现自主定位和地图构建,在煤矿井下综采工作面、工程勘探等众多应用领域中发挥着重要作用。实施SLAM技术包括4 个方面的关键要素。
(1) 传感器选择
根据井下环境特点和定位需求,选择合适的传感器组合。激光雷达因高精度和抗干扰能力强,在煤矿井下应用中较为常见;结合摄像头和惯性测量单元(IMU) 进一步提高系统的鲁棒性和精度。
(2) 算法优化
针对井下环境的特殊性,优化SLAM算法以提高在复杂环境中的稳定性和定位精度,采用多传感器融合技术,结合不同传感器优势,提高系统对环境的感知能力。
(3) 硬件集成
典型SLAM扫描装置硬件单元构成,将传感器、计算单元等硬件设备集成到综采工作面设备,确保SLAM系统的稳定运行和实时数据处理能力,典型SLAM扫描装置硬件单元构成如图1所示。

(a)机械单元(b)摄像单元 (c)IMU惯性测量单元(d)SLAM扫描装置
图1 典型SLAM扫描装置硬件单元构成
(4) 系统集成与测试
SLAM系统集成井下监控系统、通信系统,形成完整的井下作业解决方案,在实际应用前进行充分测试和验证,确保系统可靠性和稳定性。
SLAM 技术在工作面测量的技术方案
在煤矿工作面长条形结构分布的特殊环境内,为确保测量连续性和精确性,采用移动式三维激光扫描技术。通过手持操作或将激光扫描设备安装在专用巡检小车上,实现煤矿工作面连续动态扫描。针对工作面环境特征不明显的问题,在监测区域内每隔5~10 m布设高对比度、易于识别的激光靶球,实现环境特征增强策略,为测量和监测设备提供明确参考点,减少因环境特征模糊引入的误差。
启动三维激光扫描仪,巡检小车沿预定路径或自主导航路径移动,以设定的扫描频率和分辨率记录周围环境的三维坐标信息。扫描过程中,设备内置的SLAM算法实时计算设备位置与姿态,确保精确拼接点云数据。去噪处理采集到的原始点云数据,去除因设备抖动、环境干扰等因素产生的噪声点。利用靶球作为控制点,对点云数据进行精确校准,确保不同扫描站之间的数据无缝拼接,基于预处理后的点云数据,利用专业的三维建模软件构建煤矿工作面的三维数字模型,三维扫描数据见表1。
表1 三维扫描数据

SLAM 技术工作面测量技术方案包括传感器数据采集、数据处理及特征提取、位姿估计、三维地图构建等4 个组成部分。采用基于激光扫描雷达(LiDAR) 和惯性测量单元(IMU) 的紧耦合SLAM方法,减少因剧烈振动或快速旋转导致的点云畸变。目前激光扫描雷达分为机械式、半固态、固态3 种类型。在煤矿井下工作面的工程测量中,激光扫描雷达综合考虑测量精度、环境适应性、成本效益及维护便捷性。目前采用半固态激光雷达作为测量工具。
半固态激光雷达结合了机械式和全固态激光雷达的优点,通过少量运动部件实现高精度激光扫描,避免机械式雷达高维护需求和全固态雷达在技术成熟度上的局限性,满足较大视场角覆盖,并保持较高的分辨率和测量精度,满足煤矿井下特殊环境对设备稳定性和安全性的高要求,SLAM三维建模系统技术方案如图2 所示。
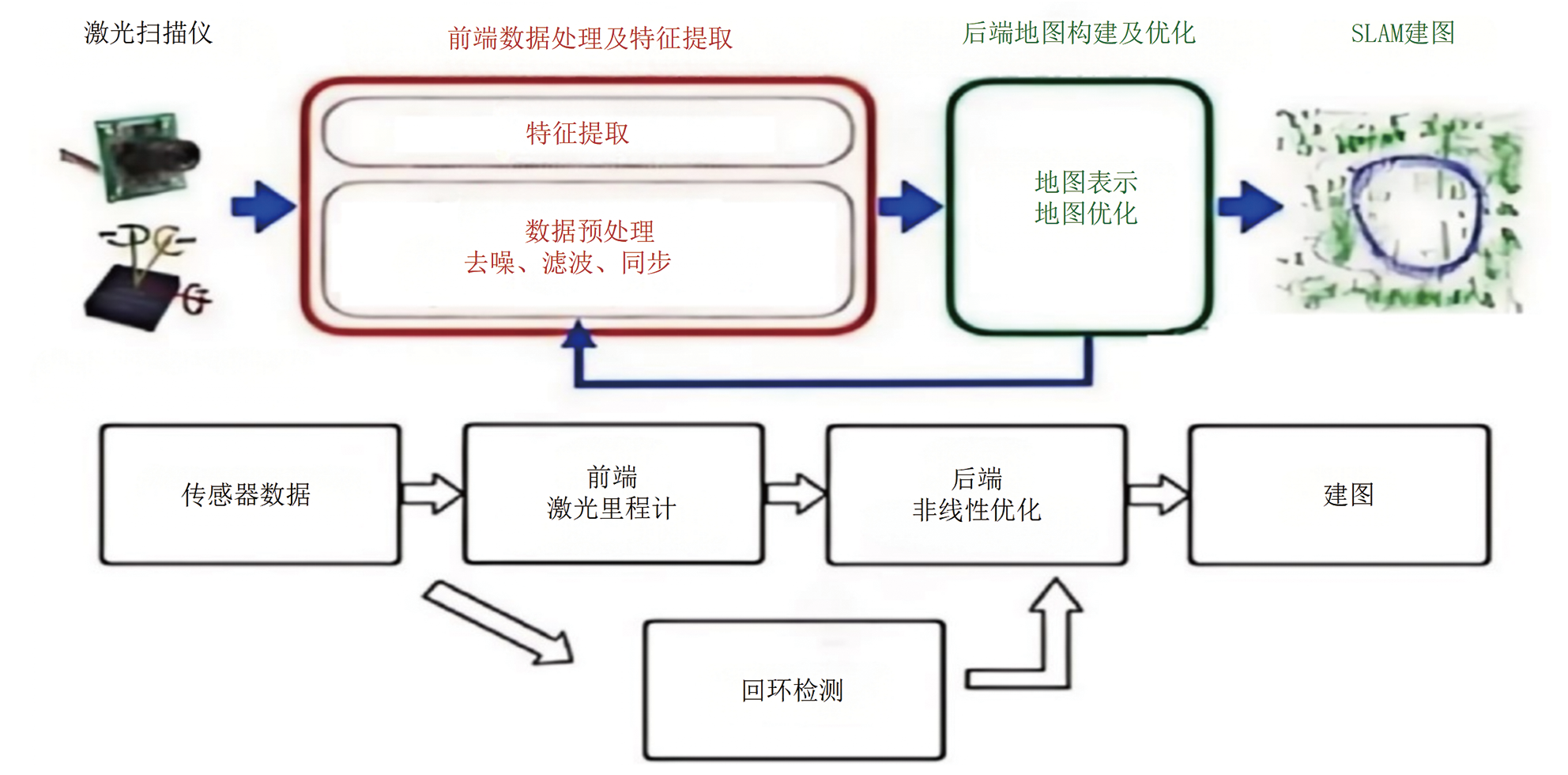
图2 SLAM三维建模系统技术方案
激光扫描雷达
根据不同分类标准激光雷达分为多种类型,且参数存在差异。半固态激光雷达(MEMS) 结合了机械式和固态式的特点,采用微机电系统(MEMS)技术控制激光束的方向,具有较好的性能和较低的成本。半固态激光雷达采用非重复扫描方式,通过电磁力驱动光楔运动的方式实现光路的改变,当光束逆着光轴Z 射入系统,从棱镜Π1出射后,随着棱镜的旋转,偏转矢量δ1的起点不变,末端沿着以δ1的大小为半径的圆做圆周运动。光束继续入射棱镜Π2,偏转矢量δ2在δ1上继续叠加。系统总偏转矢量为δ1与δ2的矢量和。通过调整2 个光楔转速,实现一定时间内的无重复扫描;通过优化δ1 和δ2 的值,激光雷达在视场角内实现全覆盖无缝扫描,非重复扫描激光雷达原理如图3 所示。
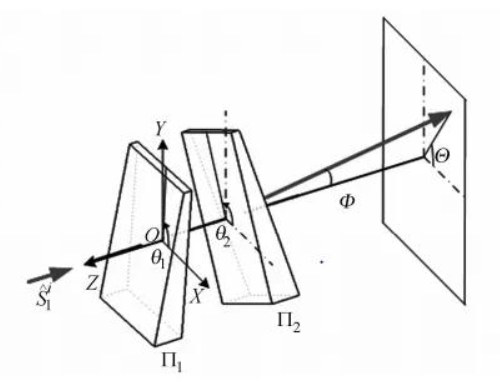
图3 非重复扫描激光雷达原理
非重复扫描技术激光雷达成像点云密度随积分时间增大,视场覆盖率也增大,探测到视场中更多细节。点云密度随积分时间变化图展示了积分时间为0.1 s、0.2 s、0.5 s、1 s 时刻的点云图(激光雷达FOV 为70°圆形)。与 2D单线激光雷达相比,在感知层面升维到3D,方便移动机器人采集足够的环境特征点自主完成建图和定位,角分辨率随时间积分显著改善,增强对细小变化的感知能力,点云密度随积分时间变化如图4 所示,角分辨率随时间变化如图5 所示。
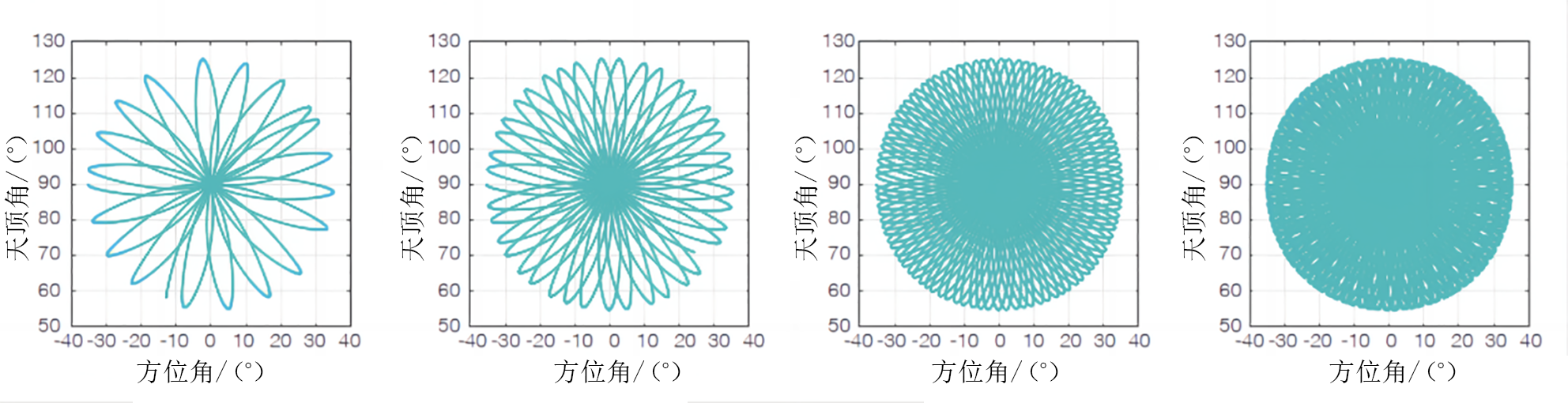
图4 点云密度随积分时间变化
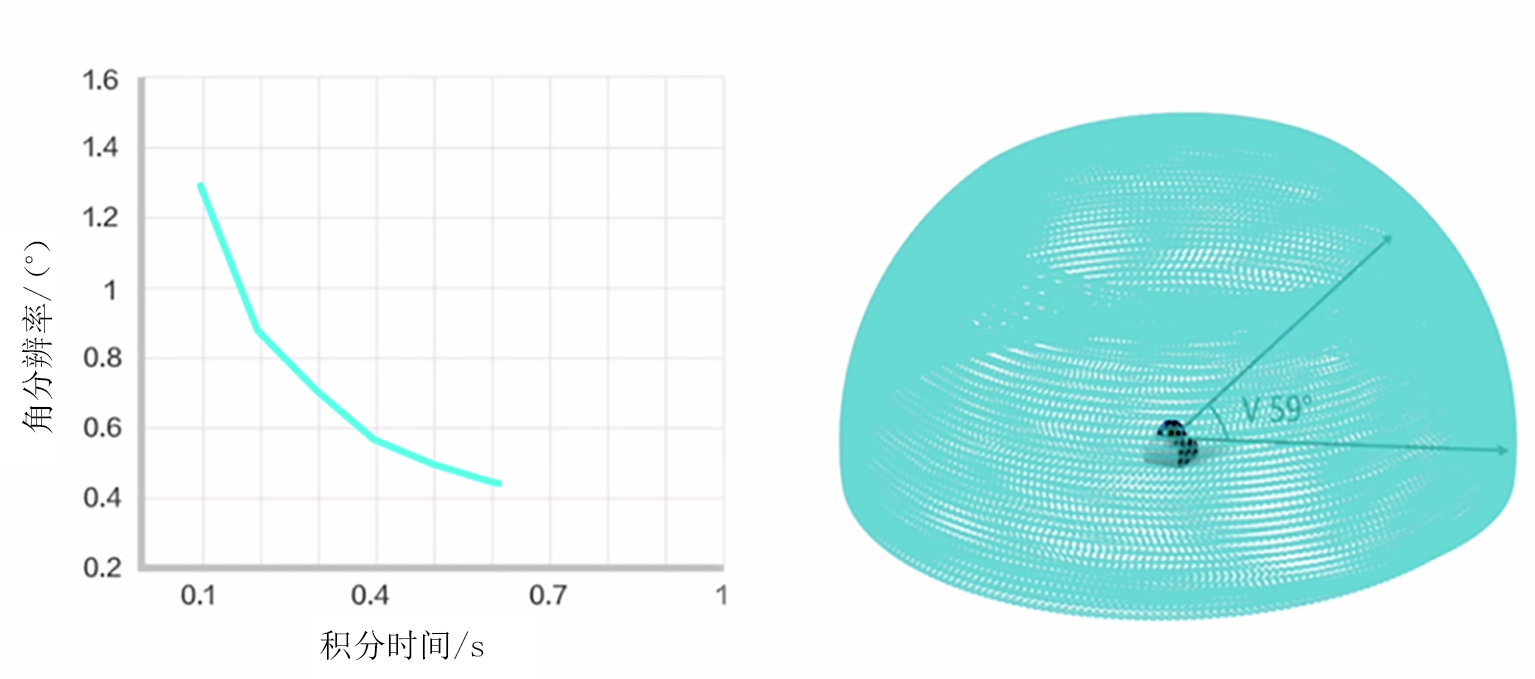
图5 角分辨率随时间变化
惯性测量装置
IMU选用ICM−40609 系列的6 轴MEMS运动跟踪设备,结合了3 轴陀螺仪和3 轴加速度计,具有高精度、高速数据传输速率和高接收灵敏度等特点,具体包括6个技术指标。
(1) 尺寸为ICM−40609−D 的尺寸为3 mm×3mm×0.91 mm。
(2) 供电电压支持I2C和SPI 输出接口,适用于多种电源配置。
(3) 操作温度范围为−20~55 °C(−4~131 ° F),存储温度范围为−40~70 °C (−40~158 °F)。
(4) 具有IP67 的防护等级,确保其在恶劣环境下也能正常工作。
(5) 与ICM−40609−D 与TDK InvenSense 的旧版设备形式因子兼容,方便旧版设备升级到最新版本。
激光标靶球
为保证在空旷巷道获得三维建模所需的匹配特征点和绝对地理坐标信息,在工作面间隔固定距离放置标靶球。标靶球的地理坐标通过全站仪测量后获取,作为校准三维地质模型地理坐标信息的依据。标靶球采用高强度 PVC材料制作,表面涂有特殊的涂剂,当激光扫描仪扫描到标靶球时,标靶球返回高强度信息点云。当激光扫描煤壁时,煤壁会吸收部分激光能量,导致煤壁返回点云强度相对较低,可通过统计学采样设置阈值,基于激光扫描仪收到的反射激光点的强度信息对点云块进行粗过滤,排除强度较弱的非标靶球点云集,激光雷达靶球实物及实时点云效果如图6所示。
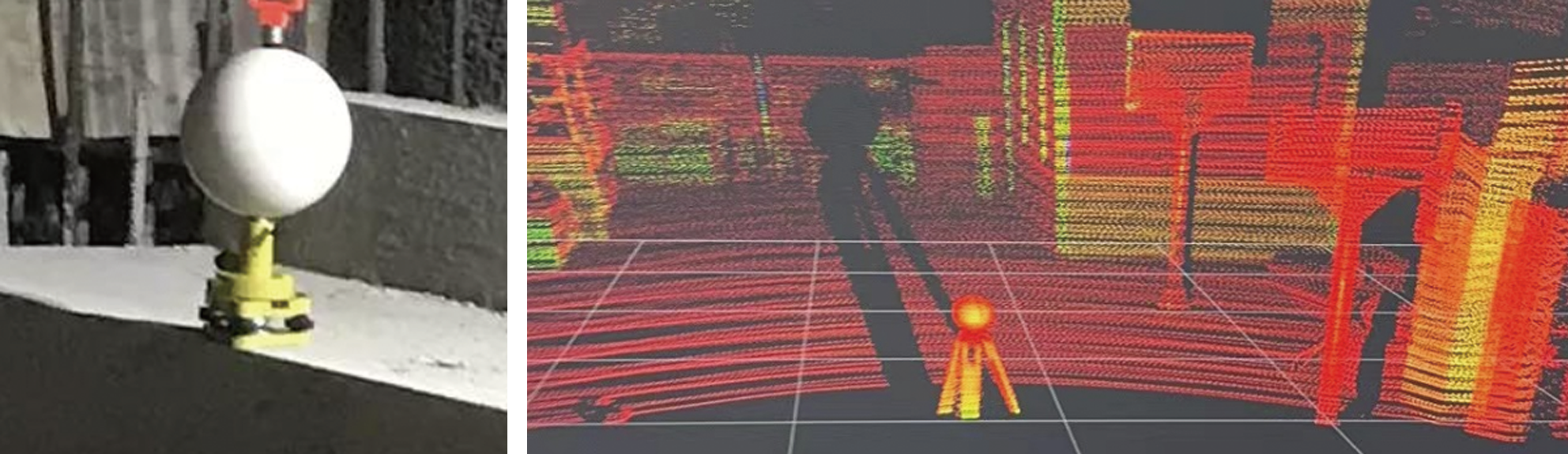
图6 激光雷达靶球实物及实时点云效果
同一标靶球球面上的点所对应的球心坐标和半径估计值都趋向于真值,以每个疑似球面点云的球心坐标和平均曲率半径估计值作为球面点的聚类特征值,根据属性聚类算法对疑似球面点进行自动分类,分割出每个独立的疑似球面点云。
FAST−LIO2 SLAM 系统
FAST−LIO2 SLAM 系统框架是基于激光雷达(LiDAR) 和惯性测量单元(IMU) 数据融合的快速、稳健且多功能的里程计框架。FAST−LIO2 建立在高效的紧耦合迭代卡尔曼滤波器的基础上,实现快速、稳健和准确的激光雷达导航和建图。
FAST−LIO2 SLAM系统满足不提取特征直接将原始点配准到地图并随后更新地图,环境中的细微特征能够被使用,提高匹配准确性,且取消提取特征模块适应不同扫描模式。FAST−LIO2 计算效率高可在大型室外环境中100 Hz里程计和建图,在杂乱的室内环境中可靠的姿态估计, 旋转速度高达1 000°/s, 适用于多线程和固态激光雷达、无人机和手持平台,以及基于Intel 和ARM的处理器,具有更高精度。
FAST−LIO2 的状态估计是从FAST−LIO 继承的紧耦合迭代卡尔曼滤波器,顺序采样的激光雷达原始点首先在10 ms (用于100 Hz 更新) 和100 ms(用于10 Hz更新) 之间的时间段内累积。累积点云称为扫描数据,为了执行状态估计,新扫描中的点云通过紧耦合迭代卡尔曼滤波框架,配准到大型局部地图中维护的地图点(即里程计),大型局部地图中的全局地图点由增量k−d 树结构ikd 树组织。如果当前激光雷达的视场范围穿过地图边界,距离激光雷达姿态最远的地图区域中的历史点将从ikd 树中删除,因此,ikd 树以一定长度跟踪大立方体区域中的所有地图点,并用于在状态估计模块中计算残差,优化姿势最终将新扫描的点云配准到全局帧,并通过以里程计的速率插入ikd树合并到地图中。
现场实施及验证
在工作面实际应用过程中,将SLAM激光建模装置(包含半固态半固态激光雷达及IUM) 安装在工作面巡检机器人上。在巡检机器人移动的过程中激光雷达收集环境数据,进行高精度测量和扫描,结合惯性测量IUM,在工作面条件发生变化时,也能准确识别自身的位置, 提高建模的准确性。SLAM建模现场实施场景如图7 所示。

图7 SLAM建模现场实施场景
在建图方面,采用先进的SharpEdge 技术,构建出高精度且无需二次优化的地图,提高了地图的准确性,减少了后续处理的复杂性。闭环检测与调整策略确保了建图过程中的实时校正,提升了地图可靠性。定位测绘软件嵌入运行在机器人的主控器中,实现了工作面的实时环境建模和精确定位能力,通过巡检机器人的无线网络与井下监控中心及地面远程调度中心进行数据交互,在地面调度中心服务器中运行RoboStudio 工具,实时监控SLAM建图状态,云端部署服务和历史数据追踪。高精度工作面激光建图场景如图8所示。
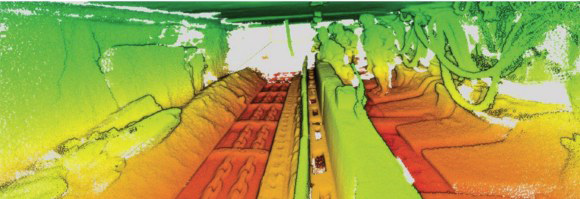
图8 高精度工作面激光建图场景
总 结
(1) SLAM应用在工作面移动式建图技术,结合巡检机器人实现了自主定位和建图能力。通过搭载高精度激光雷达传感器,机器人能够实时扫描并收集工作面的详细环境数据。利用多源融合定位框架和多重辅助定位技术,在动态变化环境中实现鲁棒性定位。
(2) 采用先进的SharpEdge 技术建图,构建出高精度且无需二次优化的地图。提高了地图准确性,减少了后续处理的复杂性。通过RoboStudio 等工具,适配不同应用场景,云端部署服务和实时监控功能,机器人部署和管理变得更加高效和便捷。
(3) 多传感器融合的SLAM方法提高了系统的整体性能,但在实际应用中仍存在机器人前端位姿估计退化失效和后端融合精度不足的问题。但在井下复杂环境下易产生累计误差,并且在旋转过程中鲁棒性较差,特征关联错误率高。下一步继续探索更高效的多传感器融合方法、改进特征提取与匹配算法,并开发适应恶劣环境的低成本传感器方案,以推动SLAM技术在煤矿井下的广泛应用。
策划:李金松 编辑:钱小静
- 相关推荐
